Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Tendances produits
{{{sourceTextContent.title}}}
Solution d'alimentation flexible à ressort
{{{sourceTextContent.subTitle}}}
Solution d'alimentation flexible à ressort, alimentateur flexible, système d'alimentation flexible robotisé
{{{sourceTextContent.description}}}
Dans les lignes de production automatisées pour l'électronique 3C, les composants automobiles et les appareils médicaux, les ressorts servent d'éléments élastiques centraux. L'efficacité et la précision de leurs processus d'assemblage et d'inspection déterminent directement le rendement et la capacité de l'ensemble de la chaîne de production. Toutefois, en raison de leur structure hélicoïdale, de leurs extrémités complexes et de leur tendance à s'emmêler et à se déformer, les ressorts sont devenus un "casse-tête chronique" pour l'alimentation automatisée. Les bols vibrants rigides traditionnels provoquent souvent l'enchevêtrement et le blocage des ressorts, ainsi que la déformation par flexion. En outre, les différences minimes de caractéristiques entre les ressorts gauches et droits et leurs côtés avant/arrière rendent difficile une distinction précise pour les systèmes de vision traditionnels, ce qui entraîne des mélanges fréquents et des problèmes de fausse détection.
I. Principaux points problématiques de l'alimentation traditionnelle des ressorts
L'alimentation traditionnelle en ressorts utilise principalement des bols vibrants en spirale, reposant sur des pistes rigides et une logique de tri forcée. Lorsque l'on manipule des composants irréguliers et fragiles comme les ressorts, quatre défauts critiques apparaissent :
Des enchevêtrements et des coincements fréquents : La structure hélicoïdale des ressorts les rend susceptibles de s'enchevêtrer les uns dans les autres. Après l'empilage, ils forment des "amas de matière" Les vibrations rigides non seulement ne parviennent pas à les disperser efficacement, mais exacerbent également l'enchevêtrement, ce qui entraîne des blocages et des temps d'arrêt. Le taux de réussite de l'alimentation n'est que de 80 à 85 %.
Dommages dus à la flexion et à la déformation : Les collisions et les frottements entre les ressorts et le bol rigide et les rails provoquent facilement le pliage, la torsion et la déformation des ressorts minces et des micro-ressorts (diamètre du fil <1 mm), avec des taux de rebut supérieurs à 5 %.
Reconnaissance visuelle instable : Les formes complexes des courbes d'extrémité des ressorts et les différences minimes entre les ressorts gauche/droite et leurs faces avant/arrière font que les systèmes de vision traditionnels, qui s'appuient sur des points de caractéristiques définis manuellement, atteignent une précision de reconnaissance inférieure à 95 %. Il en résulte des mélanges avant/arrière et des inspections manquées.
Efficacité de changement extrêmement faible : Les ressorts ayant des diamètres de fil, des nombres de bobines et des directions d'enroulement différents nécessitent des pistes dédiées personnalisées. Le changement de format prend de 2 à 4 heures, ce qui ne permet pas de s'adapter aux besoins d'une production flexible, multi-variétés et en petites séries.
II. Solution de base pour l'alimentation flexible des ressorts
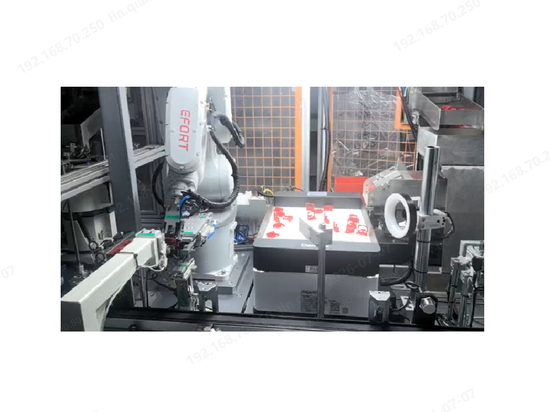
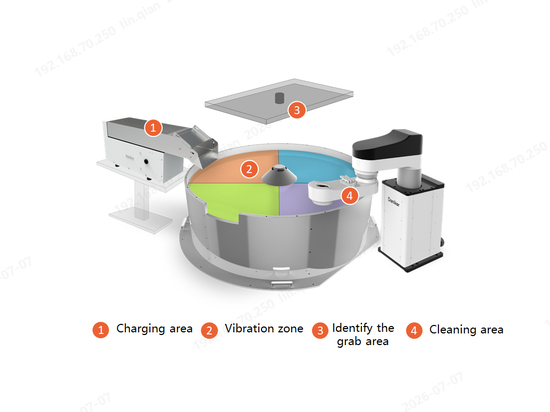
Le système d'alimentation flexible des ressorts de Danikor adopte comme logique de base "dispersion flexible + vision AI + prélèvement de précision". Grâce à la coordination d'algorithmes matériels et logiciels personnalisés, il permet d'alimenter les ressorts sans dommages, de manière efficace et précise.
Vibration flexible : Contrairement aux bols vibrants traditionnels qui s'appuient sur un entraînement électromagnétique pour obtenir une vibration sur une seule voie et qui peinent à répondre aux besoins de transport de matériaux minuscules, irréguliers et fragiles, l'alimentation flexible utilise quatre moteurs à bobine mobile haute performance contrôlés par différence de phase pour obtenir des effets de dispersion et de retournement à l'intérieur du bol. Même les ressorts enchevêtrés peuvent être facilement séparés. La surface antiroulis permet aux ressorts de se stabiliser rapidement et de conserver leur position, ce qui facilite la reconnaissance visuelle et le positionnement précis pour le prélèvement.
Algorithme intelligent AI Vision : Distinction précise entre l'avant et l'arrière et résolution des problèmes de reconnaissance de la main gauche et de la main droite. Les ressorts (en particulier les ressorts à main gauche et à main droite) présentent des différences minimes entre leurs faces avant et arrière et leurs sens d'enroulement, ce qui rend la reconnaissance stable difficile pour les systèmes de vision traditionnels. Les algorithmes d'auto-apprentissage de la vision artificielle constituent une avancée majeure :
Auto-apprentissage des caractéristiques multi-angles : Le système recueille automatiquement des échantillons d'images des faces avant et arrière des ressorts, ainsi que des différentes directions d'enroulement pour la modélisation. Grâce à des algorithmes d'apprentissage profond, il extrait automatiquement les différences subtiles dans les motifs de spirale, les contours de courbure et les caractéristiques de la face terminale afin d'établir des modèles de reconnaissance de haute précision.
Amélioration de la technologie de capture à la volée : Après que les ressorts ont été prélevés dans le bol vibrant, leur position dans la pince présente souvent de légères déviations. C'est pourquoi une caméra de capture volante à vue de dessous est ajoutée entre le bol vibrant et le point de placement. Lorsque le robot passe au centre du champ de vision de la caméra avec la pièce, il déclenche un instantané au niveau de la milliseconde. Le système calcule alors en temps réel la déviation de la pièce par rapport au centre de la pince et la corrige automatiquement avant de se déplacer vers le point de placement. Cela permet d'améliorer la précision du placement tout en maintenant le temps de cycle.
Résumé
La technologie d'alimentation flexible, grâce à des vibrations flexibles pour éviter l'enchevêtrement, des bols de matériau fendus et perforés pour éviter la déformation, la vision IA pour distinguer précisément l'avant et l'arrière, et la technologie de capture volante pour la détection des défauts à grande vitesse, constitue une solution complète d'alimentation automatisée pour les ressorts de précision qui résout entièrement les principaux points problématiques de l'alimentation traditionnelle.
À l'ère actuelle de la transformation de la fabrication intelligente et flexible, cette solution a été largement appliquée aux ressorts de sièges automobiles, aux micro-ressorts médicaux, aux ressorts électroniques de précision et à d'autres domaines, devenant une technologie de base pour améliorer l'efficacité, le rendement et la compétitivité des lignes de production d'assemblage de ressorts. Lors de la sélection de l'équipement, les entreprises doivent personnaliser les bols de matériaux correspondants et les algorithmes de vision en fonction du diamètre, de la taille, du sens d'enroulement et des exigences de surface du fil de ressort afin d'obtenir des performances d'alimentation optimales.