Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Tendances produits
{{{sourceTextContent.title}}}
Comment bricoler une plateforme de mouvement 6DOF
{{{sourceTextContent.subTitle}}}
pour simulateur (course/vol/entraînement/tronc)
{{{sourceTextContent.description}}}
Composants du système de mouvement 6DOF
Le système de mouvement 6DOF se compose d'une plate-forme de mouvement, d'actionneurs électriques, d'un système d'entraînement motorisé, d'un contrôleur, etc.
Parmi ces éléments, la plate-forme de mouvement inférieure est reliée au sol, tandis que la plate-forme supérieure supporte la charge utile.
En ce qui concerne les actionneurs du simulateur, vous choisissez le modèle approprié en fonction de vos besoins.
Je sais que beaucoup d'entre vous sont curieux de savoir "Quelle est la charge utile dont j'ai besoin pour la plate-forme du système de mouvement UNI 6DOF ?"
Cela dépend de vos besoins. Mais la charge unique de la valeur de l'actionneur n'est pas la charge utile divisée par six. C'est facile à comprendre. Si la plate-forme s'incline d'un côté, le centre de gravité est inégal. Une seule charge d'actionneur n'est pas en mesure de supporter une charge utile importante. Cela réduira également la portance de la vis à billes. Le poids du cockpit et du moniteur doit également être pris en considération.
Normalement, le moteur et l'entraînement sont fournis avec le kit d'actionneurs. Les servomoteurs DC/AC sont les plus populaires. Le moteur actionne l'actionneur électrique après avoir reçu des signaux du système de contrôle. Vous pouvez contrôler la position et la vitesse avec précision et facilité. Cependant, les systèmes à courant continu sont certainement moins chers. En outre, une alimentation électrique est nécessaire. Par conséquent, assurez-vous que la puissance de l'alimentation est deux fois supérieure à la puissance du moteur.
Le système de contrôle informatique est programmé pour contrôler la course et la vitesse des actionneurs linéaires électriques afin de réaliser le mouvement à plusieurs degrés de liberté de la plate-forme de mouvement dans l'espace tridimensionnel. Plus précisément, la plate-forme de mouvement est libre de changer de position par translation avant/arrière (poussée), haut/bas (soulèvement), gauche/droite (balancement) sur trois axes perpendiculaires, combinée à des changements d'orientation par rotation autour de trois axes perpendiculaires, souvent appelés lacet (axe normal), tangage (axe transversal) et roulis (axe longitudinal).
Si vous n'avez pas d'expérience dans la fabrication du système de contrôle, notre équipe d'ingénieurs peut vous aider. Le contrôleur UNI Tech s'intègre à tous les logiciels qui peuvent exporter des données télémétriques dans n'importe quel protocole. Notre contrôleur peut être compatible avec des logiciels tels que Real engine, unity etc. La solution plug and play couvre 100% des besoins des clients dans le monde entier.
Brève description des principaux composants
1)Plateforme de mouvement
La plate-forme supérieure se connecte au mécanisme simulé tel que le cockpit, le siège de conduite ou la cabine de pilotage, etc.
En ce qui concerne les joints de montage, les joints universels sont les plus courants car ils permettent une rotation de 35 degrés. L'articulation supérieure relie la plate-forme supérieure à la tige de piston des actionneurs électriques. Parallèlement, le joint articulé inférieur relie la base inférieure fixe au couvercle arrière des actionneurs.
La course, la vitesse et la charge utile de la plate-forme peuvent être personnalisées en fonction des besoins des clients.
La plate-forme inférieure est montée sur le sol pour fixer la proposition. De plus, les articulations de connexion sont disponibles pour des degrés de rotation plus importants. Par exemple, la plate-forme du système de mouvement 6DOF avec des articulations rotatives aux deux extrémités jusqu'à 360 degrés de rotation.
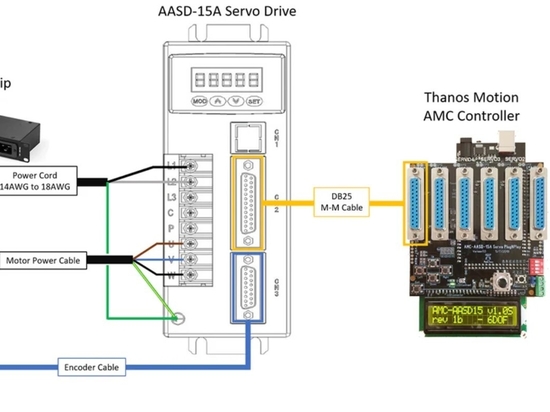
2)Le matériel du système de contrôle informatique
L'unité de commande de mouvement : elle applique l'unité de servocommande qui comprend le pilote du moteur en tant que récepteur du signal de mouvement pour réaliser le démarrage et la pause de l'ensemble de la plate-forme de mouvement.
En outre, elle reçoit le signal de commande envoyé par l'ordinateur hôte, contrôle le mouvement des cylindres électriques, surveille le servomoteur et le mouvement de l'ensemble du système de commande, traite les dysfonctionnements et assure la protection de la sécurité.
L'unité de traitement des signaux : traite tous les signaux des capteurs liés à l'ensemble du système de plate-forme de mouvement, les signaux de test et les signaux d'E/S numériques, ainsi que la commande du servomoteur. Pour l'instant, nous utilisons un ensemble complet de systèmes de contrôle, que nous pouvons fournir si nécessaire.
3)Le logiciel de contrôle
En ce qui concerne le logiciel de contrôle du mouvement, il comprend un logiciel de contrôle du mouvement et un logiciel de contrôle logique, qui peuvent être contrôlés en se connectant simplement à un ordinateur. Notre logiciel comprend 1. la réception de données provenant de jeux ; 2. le repérage des mouvements ; 3. le retour d'information des repères de mouvement vers la plate-forme de mouvement.
Pour ceux qui ont l'intention de construire une plateforme de mouvement DIY 6DOF ou une plateforme multi-degrés de liberté divertissante, l'action du joueur peut être capturée par un logiciel de jeu acheté. De plus, le signal d'action sera envoyé au contrôleur connecté aux actionneurs électriques pour que le conducteur actionne les cylindres électriques pour l'extension et la rétraction, ce qui permet de réaliser une expérience de simulation immersive.