Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Actualités du secteur
{{{sourceTextContent.title}}}
Quand avez-vous besoin d'un robot de portique ?
{{{sourceTextContent.subTitle}}}
histoire de la robotique industrielle
{{{sourceTextContent.description}}}
Quand vous pensez à un robot industriel, que vient à l'esprit ?
N'importe quoi de pareil probablement expositions d'image…
Des robots articulés comme ces derniers sont largement identifiés, grâce aux messages publicitaires de société de voiture et des ordres de danse de robot. Les robots de SCARA (bras de robot articulé par conformité sélective) sont dus également bien-reconnu à leur adoption et prolifération dans les usines depuis le début des années 1980. Chacun des deux – robots articulé et de SCARA – combinez le mouvement linéaire et rotatoire, ayant pour résultat la manoeuvrabilité pour des tâches complexes. Les robots articulés sont analogues au bras humain, avec six haches de mouvement – trois de translation (linéaire) et trois de rotation (pensez à votre épaule, coude, et poignet). Les robots de SCARA ont quatre haches de mouvement – X, Y, Z, et thêta (légèrement comme votre bras, si votre épaule étaient immobilisées).
Moins répandu dans la culture populaire, mais omniprésent dans des applications industrielles s'étendant de l'emballage à la fabrication de semi-conducteur, sont les robots cartésiens. Pendant que leur nom implique, ces robots fonctionnent dans les trois haches cartésiennes – X, Y, et, Z – bien qu'ils puissent inclure un axe de thêta pour l'outillage de fin-de-bras. Tandis que moins de « sexy » que les robots articulé et de SCARA, les robots cartésiens sont beaucoup plus souples, avec des capacités de charge plus élevées pour leur taille, et dans de nombreux cas, une meilleure précision. Elles sont également fortement adaptables, car les haches peuvent être améliorées ou changées avec relativement peu de reconfiguration pour satisfaire à des exigences en évolution de produit ou d'application.
Des robots cartésiens, cependant, sont contraints par leur conception en soi en porte-à-faux, qui limite leur capacité de charge. C'est particulièrement vrai quand l'extérieur (Y ou Z) axe a une longueur à longue course, causant une grande charge de moment sur les haches de soutien. Dans les cas où de longues courses et charges élevées sont exigées, un robot de portique est la meilleure solution.
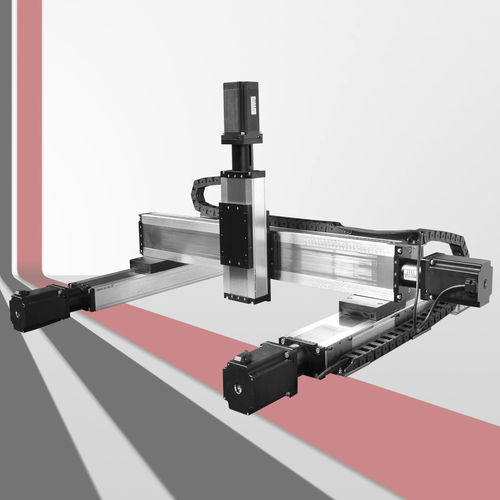
De cartésien au portique :
Un robot de portique est un style modifié de robot cartésien, utilisant deux haches de X (ou base) plutôt que l'axe bas simple trouvé dans Cartesians. L'axe des abscisses supplémentaire (et les haches parfois supplémentaires de Y et de Z) permet au robot de manipuler de plus grandes charges et des forces, les rendant idéales pour de transfert des charges utiles ou des pièces lourdes chargeant et déchargeant. Chaque axe est basé sur un déclencheur linéaire, si c'est un déclencheur « fait maison » assemblé par l'OEM ou l'intégrateur, ou un déclencheur prémonté d'une société de mouvement linéaire. Ceci signifie qu'il y a des options presque sans limites à tenir compte de n'importe quelle combinaison des grandes vitesses, des longues courses, des charges utiles lourdes, et de l'exactitude de positionnement élevée. Des conditions pour les environnements durs ou à faible bruit spéciales sont facilement incorporés, et si l'application exige des processus simultanés mais indépendants pour avoir lieu, les haches horizontales peuvent être construits avec les moteurs linéaires utilisant les chariots multiples.
Des robots de portique sont typiquement montés au-dessus de l'emplacement de travail (par conséquent le terme commun, « le portique aérien "), mais si la pièce n'est pas appropriée à la manipulation d'en haut, comme c'est le cas avec les piles solaires et les modules, le portique peut être configuré pour travailler de dessous la cloison. Et tandis que des robots de portique sont typiquement considérés en tant que systèmes très grands, ils sont également appropriés à de plus petites, même de taille d'un bureau machines. Puisqu'un robot de portique a deux X, ou base, haches, la charge de moment présentée par les haches de Y et de Z, aussi bien que la charge utile fonctionnante, sont résolus comme forces sur les axes des abscisses. Ceci augmente de manière significative la rigidité du système, et permet dans la plupart des cas aux haches d'avoir des longueurs plus à longue course et des vitesses plus élevées qu'un robot cartésien semblable.
Quand il y a deux haches en parallèle, il est commun pour seulement un d'entre eux à conduire par le moteur, afin d'empêcher lier qui pourrait résulter légèrement du mouvement -de-synchro entre les deux. Au lieu de conduire les deux haches, un axe ou un tube se reliant de couple est utilisé pour transférer la puissance de moteur au deuxième axe. Et dans certains cas, le deuxième axe peut être un « oisif » ou disciple, ne se composant d'un guide linéaire pour fournir l'appui pour la charge, mais d'aucun mécanisme d'entraînement. La décision de si et comment conduire le deuxième axe dépend de la distance entre les deux haches, le taux d'accélération, et la rigidité de la connexion entre eux. L'entraînement seulement d'un dans une paire de haches réduit également le coût et la complexité du système.
Le classement par taille d'un robot cartésien ou de portique est plus compliqué que classant un SCARA ou un robot articulé (qui sont typiquement spécifiés avec trois paramètres : la portée, la vitesse, et l'exactitude), mais les fabricants ont facilité le processus au cours des dernières années en présentant les systèmes préconfigurés et les outils en ligne, tels que le constructeur linéaire de modules de configurateur d'EasySelect de Rexroth ou de 3D de l'adepte. Ces outils permettent à l'utilisateur de spécifier l'orientation et la taille des haches, aussi bien une course, une charge, et des paramètres de base de vitesse. Les dossiers téléchargeables de DAO sont également une norme offrant des fabricants cartésiens et de portique de robot, les rendant faciles à intégrer dans une disposition de conception ou de déroulement des opérations, tout comme SCARA et robots articulés. Tandis que des robots articulé et de SCARA sont facilement identifiés, et des robots cartésiens sont largement déployés, la conception de portique surmonte leurs limitations inhérentes dans la charge, la vitesse, la portée, et la répétabilité, avec un niveau inégalé de la personnalisation et de la flexibilité. Dans un mot, les robots de portique offrent la meilleure combinaison de la charge utile et de la course.