Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Actualités du secteur
{{{sourceTextContent.title}}}
Composants de classification et de noyau de robot du même rang cartésien
{{{sourceTextContent.subTitle}}}
positionnement, commande, contrôle et système terminal
{{{sourceTextContent.description}}}
Les coordonnées rectangulaires de la classification du robot :
1, selon l'utilisation des points : robots de soudure, robots de palletisation, robots de colle (distribution), robots de détection (surveillance), assortissant des robots (de classification), des robots d'assemblée, des robots d'EOD, des robots médicaux, des robots spéciaux, etc.
2, selon les points structurels de forme : robot fixé au mur (d'encorbellement), robot de portique, robot à l'envers et tout autre robot rectangulaire typique.
3, selon des degrés de liberté : robots de deux-coordonnée, robots de trois-coordonnée, robots de quatre-coordonnée, robots de cinq-coordonnée, robots de six-coordonnée.
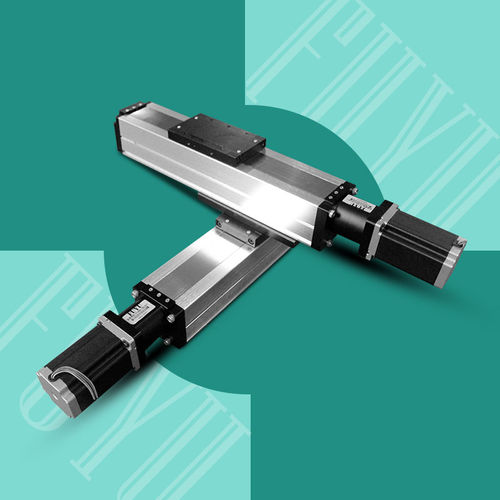
Composants du même rang cartésiens de noyau de robot - l'unité de positionnement linéaire afin de réduire le coût de robots cartésiens, raccourcir le cycle de développement de produit, la fiabilité de produit d'augmentation, améliorer la performance des produits, dans beaucoup de pays en Europe et l'Amérique ont été le robot du même rang rectangulaire modulaire, le linéaire plaçant l'unité (système) est le produit le plus typique de la modularisation.
Une unité de positionnement complète (système) se compose de plusieurs pièces
1, plaçant le profil de corps : Car la pièce de montage de soutien de la voie, ce profil est différente du profil général de cadre, elle exige une rectitude très élevée, planéité.
2, voie de mouvement : installé sur le profil de positionnement de corps, soutenez directement le mouvement du glisseur. Un corps de positionnement que le profil (système) peut être installé avec une voie de mouvement, ou lui peut être installé avec une pluralité de voies de mouvement. Les caractéristiques et la quantité de la voie directement affecter les caractéristiques mécaniques de l'unité de positionnement (système). Les types de voies qui composent le système de positionnement sont très communs. Il y a les roulements à billes linéaires et les incidences en acier cylindrique droites.
3, glisseur de mouvement : se compose du plat de support de charge, soutenant le cadre, groupe de rouleau (groupe de boule), brosse de la poussière, cavité de lubrification, couverture de cachetage. Les glisseurs de mouvement sont ajoutés aux rails par des rouleaux ou des boules. Réalisez les conseils des sports.
4, composants de transmission : Les composants généraux de transmission sont ceinture synchrone, ceinture dentée, vis/vis de boule, support, moteur linéaire et ainsi de suite.
7, soutenant et soutenant le siège : utilisé pour installer l'élément de transmission et l'élément d'entraînement.
Éléments du même rang cartésiens d'entraînement de robot - le système d'entraînement de moteur l'unité de positionnement linéaire (système) peut réaliser le mouvement précis plaçant, qui est déterminé par le système d'entraînement de moteur.
Les systèmes utilisés généralement d'entraînement sont :
Système d'entraînement de moteur servo d'AC/branch, système d'entraînement de moteur pas à pas, moteur servo linéaire/système linéaire d'entraînement de moteur pas à pas. Chaque système d'entraînement se compose d'un moteur et d'un conducteur. La fonction du conducteur est d'amplifier le signal faible et de le charger sur le moteur électrique fort pour conduire le moteur. Le moteur convertit les signaux électriques pour préciser la vitesse et l'écart angulaire.
Dans les occasions exigeant la dynamique élevée, l'opération ultra-rapide, la commande de haute puissance et d'autres occasions, système de moteur servo d'AC/branch est employée comme commande ; dans les conditions de la basse dynamique, de l'opération à vitesse réduite, de la commande de basse puissance et d'autres occasions, le système de moteur pas à pas peut être employé comme commande ; La dynamique très élevée, l'opération à grande vitesse, l'exactitude de positionnement élevée et d'autres occasions emploieront la commande servo linéaire.
Le contrôle du même rang cartésien de robot afin de réaliser la fonction flexible et diverse du robot de mouvement et la fonction de traitement rapide de réponse, le robot doit avoir un système de cerveau-contrôle.
La fonction du système de contrôle est de publier des instructions de mouvement, données de processus, déterminent le mouvement, etc. Elle peut publier des instructions de contrôle, recevoir des signaux de retour, et détermine l'information de traitement à tout moment selon le programme numéroté.
Selon la situation de travail, le système de contrôle peut prendre beaucoup de différentes formes :
1. Combinaison d'IPC et de carte ordre de mouvement : La carte ordre de mouvement emprunte des ressources d'informatique et emploie sa propre fonction de commande de mouvement pour réaliser le contrôle.
2, carte ordre en différé de mouvement : Empruntez l'ordinateur pour faire le programme, pouvez stocker le programme lui-même, course off-line.
3, PLC - empruntez un ordinateur pour compiler un programme, le programme peut être stocké, course off-line.
4, contrôleur consacré.
Avec cela aimable du système de contrôle, l'automaticien de mouvement choisira selon la situation réelle selon la situation du sport et les conditions de l'utilisation.
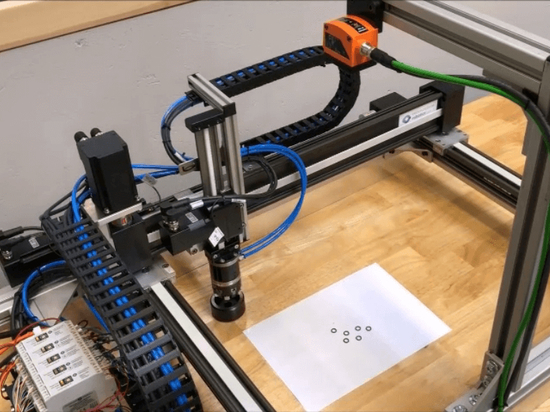
Équipement terminal cartésien de robot - les coordonnées cartésiennes de fonctionnement d'outils l'équipement terminal du robot devraient employer différent, peuvent être équipées d'un grand choix d'outils de fonctionnement :
Par exemple, un outil terminal de l'opération de robot de soudure est un chalumeau : un outil terminal de palletisation d'opération de robot est une pince ; un outil terminal d'opération de robot de colle (distribution) est une arme à feu de colle, un outil terminal d'opération de robot de détection (surveillance) est une caméra ou un laser.
Quelques tâches travail-intensives ne peuvent pas être accomplies un outil de fonctionnement simple. Il est nécessaire d'installer les outils deux ou plus fonctionnants. Par exemple, en plus du besoin de pince mécanique, une caméra est également exigée pour la capture d'un objet mobile non stationnaire, qui dépiste constamment la position spatiale de l'objet calculé.