Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Actualités du secteur
{{{sourceTextContent.title}}}
Robots de manutention : Ce qu'il faut savoir avant d'automatiser
{{{sourceTextContent.subTitle}}}
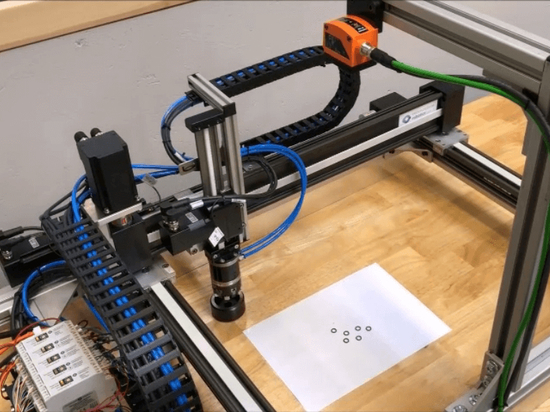
Robots cartésiens pour les applications de manutention.
{{{sourceTextContent.description}}}
De nombreux fabricants modernes réalisent d'importants gains de productivité en automatisant leurs tâches de manutention. Cependant, il n'est pas toujours évident de savoir ce que l'on entend par manutention et comment les robots contribuent à ces applications. Par conséquent, avant de commencer votre parcours d'automatisation avec des robots de manutention, il est essentiel de comprendre ce que sont les robots de manutention, les options qui s'offrent à vous et les types d'applications dans lesquelles ils sont généralement déployés pour réussir.
Que font les robots de manutention ?
La manutention est un terme général qui décrit un groupe de tâches connexes impliquant la manipulation, le transfert ou le transport d'objets d'un endroit ou d'une orientation à un autre. Ces objets peuvent être :
1. Des boîtes
2. Pièces
3. Produits alimentaires ou boissons
4. Composants
5. Récipients
La manutention est un processus essentiel qui relie l'ensemble du processus de fabrication. Par exemple, les tâches de manutention peuvent se produire sur la même machine. Plus précisément, un robot ou un opérateur peut avoir besoin de réorienter une pièce au cours d'un processus. Ou encore, un composant doit être transporté d'une station à une autre. La manutention est le processus qui consiste à déplacer ces pièces de l'endroit où elles se trouvent à celui où elles doivent se trouver.
Applications courantes des robots de manutention
Il existe plusieurs applications que les fabricants classent dans la catégorie des applications de manutention. L'objectif principal d'une tâche de manutention est de déplacer un composant d'un endroit ou d'une orientation à un autre. En général, la manutention peut être une tâche secondaire d'une application plus étendue. Par exemple, une application de soudage automatisé peut comporter une composante de manutention. Avant le soudage, une machine peut présenter la pièce au robot de soudage. Après la soudure, un robot peut transférer la pièce sur une bande transporteuse. Ces deux exemples sont des exemples de manutention. D'autres exemples incluent :
1. L'entretien des machines CNC
2. Manipulation de presse
3. Collecte de bacs
4. Palettisation
5. Assemblage
6. Transfert de pièces
7. Emballage
Quelles industries utilisent des robots de manutention ?
Vous pouvez trouver des robots de manutention dans presque toutes les industries. Comme il s'agit d'une tâche si courante pour les fabricants, il est difficile de trouver une industrie qui n'utilise pas de robots de manutention. Les secteurs les plus populaires pour ces robots incluent :
1. L'aérospatiale
2. Automobile
3. Soudage
4. Métaux
5. Plastiques
6. Produits alimentaires et boissons
7. Logistique
8. Commerce de détail
9. Produits pharmaceutiques
Comment les robots automatisent les tâches de manutention des matériaux
La manutention peut être une tâche banale et répétitive lorsqu'elle est effectuée manuellement. Malheureusement, cela peut conduire à des travailleurs qui ne sont pas satisfaits ou engagés dans leur travail, ce qui se traduit par des performances et un moral médiocres. Les tâches de ce type sont souvent de bons candidats pour l'automatisation, il n'est donc pas surprenant que les tâches de manutention fassent partie des applications de fabrication les plus couramment automatisées. En fait, ce groupe de tâches est souvent la première cible de l'automatisation pour les fabricants qui découvrent la robotique.
Présentation de la pièce
Les processus peuvent présenter des pièces à un robot de différentes manières. Les bandes transporteuses sont une méthode courante de présentation des pièces. C'est notamment le cas lorsque les pièces se déplacent d'une station à une autre sur une distance importante. Cependant, il n'est pas rare de voir d'autres méthodes de présentation des pièces, telles que :
1. D'autres robots
2. Tables tournantes
3. Tables de chargement
4. Autres machines
5. Systèmes Kanban
Emplacement des pièces
Les applications de manutention exploitent la capacité du robot à effectuer des tâches répétitives rapidement et efficacement sur une période prolongée. Les tâches de manutention ont tendance à avoir des cycles prévisibles où les pièces arrivent dans la même position et orientation à chaque fois. Pour les tâches imprévisibles, des capteurs ou des systèmes de vision supplémentaires peuvent aider le robot à localiser les objets.
Manipulation de pièces
Les robots manipulent les objets à l'aide d'un outillage spécial en bout de bras. Ces outils sont choisis en fonction de l'objet spécifique pour un contrôle efficace et prévisible. Par exemple, les intégrateurs choisissent souvent des préhenseurs mécaniques pour la plupart des applications. Cependant, les matériaux ferreux peuvent bénéficier d'un préhenseur électromagnétique. D'autres composants peuvent nécessiter un préhenseur souple ou une ventouse. Le type de pièce définit souvent le meilleur type de préhenseur.
Les détails de l'application sont essentiels pour toutes les applications d'automatisation. Cependant, ils sont particulièrement critiques pour les applications de manutention. Si l'on néglige des exigences spécifiques, le système risque d'être moins performant ou de ne pas pouvoir accomplir la tâche souhaitée. Par exemple, un mauvais choix de préhenseur peut aboutir à un robot qui ne peut pas manipuler le composant de manière fiable. Bien qu'il soit important de comprendre ces détails, la plupart des fabricants ont intérêt à travailler avec des experts en automatisation.