Ajouter à mes favoris
Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais
cliquez ici
#Tendances produits
{{{sourceTextContent.title}}}
Deux entraînements pour un mouvement précis à deux vitesses
{{{sourceTextContent.subTitle}}}
Rapidité ou précision ?
{{{sourceTextContent.description}}}
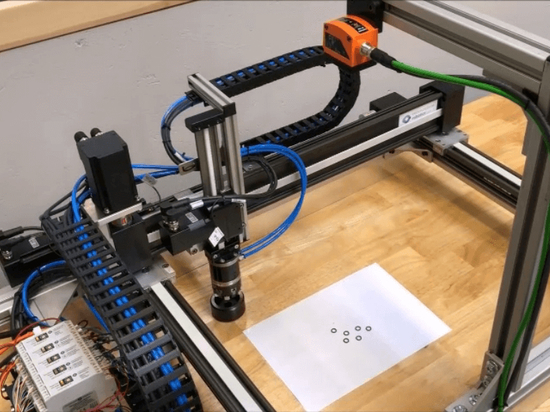
Les systèmes de positionnement linéaire de haute précision, tels que ceux utilisés pour la mise au point et le balayage dans les équipements de mesure et d'inspection, nécessitent souvent deux modes de mouvement différents : un mode rapide (100 mm/sec) suivi d'un mode plus lent (20 nm/sec). Le mode rapide réduit le temps de déplacement, tandis que le mode plus lent assure la précision. Jusqu'à présent, une conception courante utilisait des étages séparés, l'un entraîné par une vis à billes ou un moteur linéaire et le second, monté sur le premier, entraîné par un micromètre motorisé ou un moteur piézoélectrique.
Les ingénieurs ont développé une approche alternative : un étage unique économique avec deux systèmes d'entraînement indépendants. Deux moteurs rotatifs, un servomoteur à courant continu standard et un moteur PiezoLeg, sont montés à chaque extrémité d'une vis à billes de haute précision Steinmeyer. Un embrayage électromagnétique contrôle la connexion entre le moteur PiezoLeg et la vis à billes. Le servomoteur à courant continu est toujours connecté, mais n'est alimenté que pour les déplacements rapides.
En mode haute vitesse, l'embrayage active et désactive le moteur du PiezoLeg. Un moteur à courant continu classique avec encodeur rotatif prend en charge la tâche d'entraînement. Comme les mouvements à grande vitesse peuvent être exécutés rapidement, la chaleur introduite par le moteur à courant continu est très faible. En fonction du pas de la vis à billes, la vitesse utilisable va de 0,1 à 100 mm/sec.
Lorsque l'embrayage est hors tension, le moteur du PiezoLeg se connecte à la vis à billes. Un sous-système de mesure linéaire à haute résolution fournit des informations sur la position au contrôleur de mouvement. Lorsque l'embrayage est désactivé, les effets thermiques des électro-aimants sont minimisés. Et en position de repos, le piézomoteur fonctionne comme un frein passif - empêchant tout mouvement indésirable de la scène. Cependant, après le passage au moteur PiezoLeg, une gamme de vitesse de 0,15 à environ 0,00002 mm/sec (20 nm/sec) est possible. La stabilité des vitesses dans la plage de vitesse inférieure dépend de la résolution de l'échelle linéaire utilisée.
Le rapport entre la vitesse maximale et la vitesse minimale est de 1 million à 1, ou plus, et il est possible de passer de la vitesse rapide à la vitesse lente de haute précision et vice versa. Le mouvement dans les deux modes n'est limité que par la plage de déplacement du système de positionnement.