Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Tendances produits
{{{sourceTextContent.title}}}
Quels sont les meilleurs moteurs : servos ou pas à pas ?
{{{sourceTextContent.subTitle}}}
Vitesse, couple et précision.
{{{sourceTextContent.description}}}
Les moteurs pas à pas en boucle fermée peuvent être le meilleur choix pour les tâches habituellement effectuées par des servos, car les pas à pas traditionnels ne pouvaient pas les gérer.
L'une des décisions les plus critiques que les ingénieurs peuvent prendre lors de la conception de tout type de processus de contrôle du mouvement est le choix du moteur. Le choix du bon moteur, tant en termes de type que de taille, est impératif pour l'efficacité opérationnelle de la machine finale. En outre, s'assurer que le moteur ne fera pas exploser le budget est toujours une préoccupation majeure.
L'une des premières questions auxquelles il faut répondre avant de prendre une décision est la suivante : quel type de moteur serait le meilleur ? L'application nécessite-t-elle un servomoteur haute performance ? Un moteur pas à pas bon marché serait-il préférable ? Ou peut-être y a-t-il une troisième option, intermédiaire, à envisager ?
Les réponses commencent par les besoins de l'application spécifique. Il y a de nombreux facteurs à prendre en compte avant de déterminer le type de moteur qui serait idéal pour une application donnée.
Les exigences
Combien de cycles par minute le moteur doit-il effectuer ? Quel est le couple nécessaire ? Quelle est la vitesse de pointe requise ?
Pour répondre à ces questions essentielles, il ne suffit pas de choisir un moteur d'une puissance donnée.
La puissance de sortie d'un moteur est la combinaison du couple et de la vitesse, qui peut être calculée par la multiplication de la vitesse, du couple et d'une constante.
Toutefois, en raison de la nature de ce calcul, il existe de nombreuses combinaisons différentes de couple et de vitesse qui donnent une puissance de sortie spécifique. Ainsi, des moteurs différents ayant une puissance nominale similaire peuvent fonctionner différemment en raison de la combinaison de vitesse et de couple qu'ils offrent.
Les ingénieurs doivent savoir à quelle vitesse une charge d'une certaine taille doit se déplacer avant de choisir en toute confiance le moteur qui fonctionnera le mieux. La tâche à accomplir doit également correspondre à la courbe couple/vitesse du moteur. Cette courbe montre comment le couple d'un moteur varie pendant son fonctionnement. En utilisant les hypothèses les plus défavorables (en d'autres termes, en déterminant la quantité maximale/minimale de couple et de vitesse que la tâche exigera), les ingénieurs peuvent être sûrs que le moteur choisi a une courbe de couple/vitesse suffisante.
L'inertie de la charge est un autre facteur qui doit être pris en compte avant de plonger dans le processus décisionnel du choix d'un moteur. Le rapport d'inertie doit être calculé, c'est-à-dire la comparaison entre l'inertie de la charge et l'inertie du moteur. Selon une règle empirique, si l'inertie de la charge est supérieure à 10 fois celle du rotor, le réglage du moteur peut être plus difficile et les performances peuvent en souffrir. Mais cette règle varie non seulement d'une technologie à l'autre, mais aussi d'un fournisseur à l'autre et même d'un produit à l'autre. Le degré de criticité d'une application influe également sur cette décision. Certains produits gèrent des rapports allant jusqu'à 30 pour 1, alors que les entraînements directs peuvent aller jusqu'à 200 pour 1. Beaucoup de gens n'aiment pas dimensionner un moteur qui dépasse un rapport de 10 pour 1.
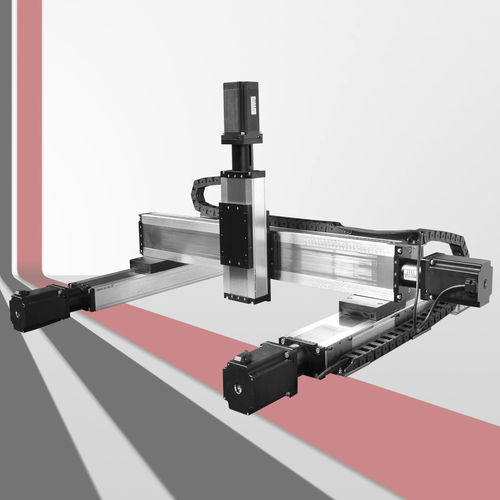
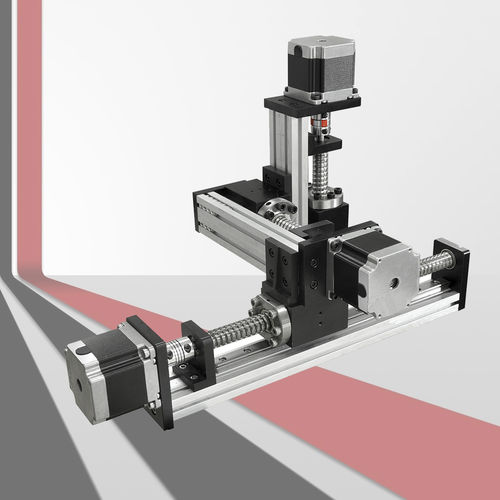
Enfin, existe-t-il des limites physiques qui restreignent l'utilisation d'un moteur plutôt qu'un autre ? Les moteurs ont des formes et des tailles différentes. Dans certains cas, les moteurs sont grands et encombrants, et certaines opérations ne peuvent pas accueillir un moteur d'une certaine taille. Avant de pouvoir prendre une décision éclairée sur le meilleur type de moteur, ces spécifications physiques doivent être reconnues et comprises.
Une fois que les ingénieurs ont répondu à toutes ces questions - vitesse, couple, puissance, inertie de la charge et limitations physiques - ils peuvent choisir la taille de moteur la plus efficace. Toutefois, le processus de décision ne s'arrête pas là. Les ingénieurs doivent également déterminer quel type de moteur convient le mieux à l'application. Pendant des années, le choix du type se résumait à l'une des deux options suivantes pour la plupart des applications : un servomoteur ou un moteur pas à pas à boucle ouverte.
Servomoteurs et moteurs pas à pas
Les principes de fonctionnement des servomoteurs et des moteurs pas à pas à boucle ouverte sont similaires. Cependant, il existe des différences essentielles entre les deux, que les ingénieurs doivent comprendre avant de décider quel moteur est idéal pour une application donnée.
Dans les systèmes servo traditionnels, un contrôleur envoie des commandes à l'entraînement du moteur par le biais d'impulsions et de directions ou d'une commande analogique liée à la position, à la vitesse ou au couple. Certaines commandes peuvent utiliser une méthode basée sur un bus, qui, dans les commandes les plus récentes, est généralement une méthode de communication basée sur Ethernet. Le variateur envoie ensuite le courant approprié à chaque phase du moteur. Le retour d'information du moteur est transmis au variateur du moteur et, si nécessaire, au contrôleur. Le variateur s'appuie sur ces informations pour commuter correctement le moteur et envoyer de bonnes informations sur la position dynamique de l'arbre moteur. Les servomoteurs sont donc considérés comme des moteurs à boucle fermée et contiennent des encodeurs intégrés, et les données de position sont fréquemment transmises au contrôleur. Ce retour d'information permet au contrôleur de mieux contrôler le moteur. Le contrôleur peut apporter des ajustements aux opérations, à des degrés divers, si quelque chose ne fonctionne pas comme il le devrait. Ce type d'informations cruciales est un avantage que les moteurs pas à pas à boucle ouverte ne peuvent offrir.
Les moteurs pas à pas fonctionnent également sur la base de commandes envoyées à l'entraînement du moteur pour déterminer la distance parcourue et la vitesse. En général, ce signal est une commande de pas et de direction. Cependant, les moteurs pas à pas à boucle ouverte ne peuvent pas fournir de retour d'information aux opérateurs, de sorte que leurs commandes ne peuvent pas évaluer correctement une situation et faire des ajustements pour améliorer le fonctionnement du moteur.
Par exemple, si le couple d'un moteur n'est pas suffisant pour gérer la charge, le moteur peut caler ou manquer certaines étapes. Lorsque cela se produit, la position cible ne sera pas atteinte. Compte tenu des caractéristiques en boucle ouverte du moteur pas à pas, ce positionnement imprécis ne sera pas relayé de manière adéquate au contrôleur pour qu'il puisse effectuer des ajustements.
Le servomoteur semble présenter des avantages évidents en termes d'efficacité et de performance, alors pourquoi choisir un moteur pas à pas ? Il y a plusieurs raisons. La plus courante est le prix ; les budgets opérationnels sont des considérations importantes dans toute décision de conception. À mesure que les budgets se resserrent, des décisions doivent être prises pour réduire les coûts inutiles. Il ne s'agit pas seulement du coût du moteur lui-même, mais la maintenance de routine et d'urgence a tendance à être moins chère pour les moteurs pas à pas que pour les servos. Ainsi, si les avantages d'un servomoteur ne justifient pas son coût, un moteur pas à pas standard peut être suffisant.
D'un point de vue purement opérationnel, les moteurs pas à pas sont nettement plus faciles à utiliser que les servomoteurs standard. Le fonctionnement d'un moteur pas à pas est beaucoup plus simple à comprendre et plus facile à configurer. La plupart des employés sont d'accord pour dire que s'il n'y a aucune raison de compliquer les opérations, il faut rester simple.
Les avantages offerts par les deux types de moteurs sont très différents. Les servomoteurs sont idéaux si vous avez besoin d'un moteur dont la vitesse est supérieure à 3 000 tr/min et qui offre un couple élevé. Cependant, pour une application qui ne nécessite que des vitesses de quelques centaines de tours par minute ou moins, un servomoteur n'est pas toujours le meilleur choix. Les servomoteurs peuvent être excessifs pour les applications à faible vitesse.
Les applications à faible vitesse sont celles pour lesquelles les moteurs pas à pas constituent la meilleure solution possible. Les moteurs pas à pas sont non seulement reproductibles lorsqu'il s'agit de s'arrêter, mais ils sont également conçus pour fonctionner à faible vitesse tout en fournissant un couple élevé. De par la nature même de cette conception, les moteurs pas à pas peuvent être contrôlés et fonctionner jusqu'à leurs limites de vitesse. La limite de vitesse des moteurs pas à pas typiques est généralement inférieure à 1 000 tr/min, alors que les servomoteurs peuvent avoir des vitesses nominales allant jusqu'à 3 000 tr/min et plus - parfois même jusqu'à plus de 7 000 tr/min.
Si un moteur pas à pas est correctement dimensionné, il peut être le choix idéal. Toutefois, lorsqu'un moteur pas à pas fonctionne dans une configuration en boucle ouverte et que quelque chose ne va pas, les opérateurs peuvent ne pas obtenir toutes les données dont ils ont besoin pour résoudre le problème.
Résoudre le problème de la boucle ouverte
Au cours des dernières décennies, plusieurs approches différentes ont été proposées pour résoudre les problèmes traditionnels des moteurs pas à pas en boucle ouverte. L'une d'entre elles consistait à orienter le moteur vers un capteur à la mise sous tension, voire plusieurs fois au cours d'une application. Bien que simple, cette méthode ralentit les opérations et ne tient pas compte des problèmes qui surviennent au cours des processus de fonctionnement normaux.
Une autre approche consiste à ajouter une rétroaction pour détecter si le moteur cale ou s'il est hors position. Les ingénieurs des entreprises de contrôle du mouvement ont créé des fonctions de "détection de décrochage" et de "maintien de la position". Il existe même quelques approches allant encore plus loin qui traitent les moteurs pas à pas comme des servos, ou du moins les imitent avec des algorithmes fantaisistes.
Dans le grand spectre des moteurs - entre les servos et les moteurs pas à pas à boucle ouverte - se trouve une technologie relativement nouvelle connue sous le nom de moteur pas à pas à boucle fermée. C'est la meilleure façon, et la plus économique, de résoudre le problème des applications qui exigent une précision de positionnement et de faibles vitesses. En utilisant des dispositifs de rétroaction à haute résolution pour fermer la boucle, les ingénieurs peuvent profiter du "meilleur des deux mondes"
Les moteurs pas à pas à boucle fermée offrent tous les avantages des moteurs pas à pas : facilité d'utilisation, simplicité et capacité à fonctionner de manière constante à faible vitesse avec un arrêt précis. De plus, ils offrent toujours les capacités de rétroaction des servomoteurs. Heureusement, ils ne présentent pas le principal inconvénient des servomoteurs : leur prix élevé.
La clé réside toujours dans le mode de fonctionnement des moteurs pas à pas à boucle ouverte. Ils comportent généralement deux bobines, parfois cinq, avec un équilibre magnétique entre elles. Un mouvement perturbe cet équilibre, ce qui entraîne un retard électrique de l'arbre du moteur, mais l'opérateur ne peut pas savoir de combien il s'agit. Le point d'arrêt est répétable pour les moteurs pas à pas à boucle ouverte, mais pas pour toutes les charges. L'installation d'un codeur sur le moteur pas à pas et sa mise en boucle fermée permettent un contrôle dynamique. Cela permet aux opérateurs de s'arrêter à un point précis sous des charges variables.
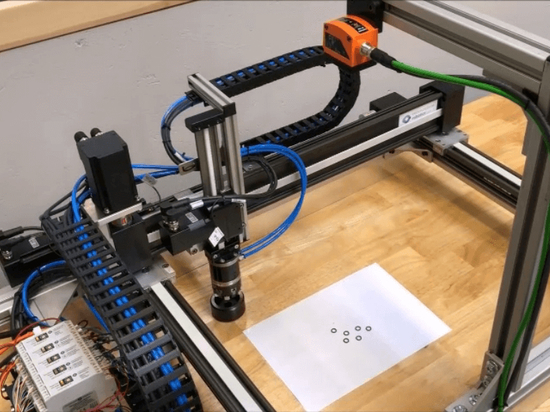
Ces avantages liés à l'utilisation de moteurs pas à pas en boucle fermée pour certaines applications ont fortement augmenté la popularité de ces moteurs dans la communauté du contrôle du mouvement. Plus précisément, dans deux des industries les plus importantes, les fabricants de semi-conducteurs et d'appareils médicaux, on constate une nette augmentation de l'utilisation des moteurs pas à pas à boucle fermée. Les ingénieurs de ces industries doivent savoir exactement où les moteurs ont positionné les charges ou les actionneurs, qu'ils alimentent une courroie ou une vis à billes. La rétroaction en boucle fermée de ces moteurs pas à pas leur permet de savoir exactement où ils se trouvent. Ces moteurs pas à pas peuvent également offrir de meilleures performances que les servos à des vitesses inférieures.
En général, toute application qui nécessite des performances garanties à un coût inférieur à celui d'un servomoteur, et la capacité de fonctionner à des vitesses relativement faibles est un bon candidat pour les moteurs pas à pas à boucle fermée.
N'oubliez pas que les opérateurs doivent s'assurer que le variateur ou les commandes prennent en charge les moteurs pas à pas en boucle fermée. Historiquement, vous pouviez obtenir un moteur pas à pas avec un encodeur à l'arrière, mais le variateur était un variateur pas à pas standard et ne prenait pas en charge les encodeurs. Le codeur devait être ramené au contrôleur et une vérification de la position devait être mise en œuvre à la fin d'un mouvement donné. Ceci n'est pas nécessaire avec les nouvelles commandes pas à pas à boucle fermée. Les variateurs pas à pas à boucle fermée peuvent gérer dynamiquement et automatiquement le contrôle de la position et de la vitesse sans faire appel à des contrôleurs.