Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Tendances produits
[Partage de projet]
Solution de connexion multi-connexion pour robots industriels
Si vous êtes à la recherche d'une solution de connexion pour les robots industriels à articulations multiples, cet article vous fournira une solution complète, apportant commodité et efficacité à tous. Les robots industriels et les systèmes d'assemblage automatisés font partie intégrante de la production industrielle moderne. Dans un environnement d'automatisation industrielle, les robots permettent de réaliser des opérations efficaces et de garantir une qualité élevée et stable à chaque étape. Les robots sont largement utilisés dans des applications telles que le soudage flexible, la pulvérisation, l'assemblage, l'emballage et le transport.
Cependant, le schéma de connexion des robots a toujours posé des difficultés. Les méthodes traditionnelles d'intégration des signaux de préhension et de fixation des robots ajoutent généralement de nombreux câbles de connexion des signaux, ce qui n'est pas propice à la maintenance et au remplacement ultérieurs. Dans les applications flexibles d'intégration multi-robots, il est souvent nécessaire de remplacer la pince d'extrémité. Si les appareils ne peuvent pas être changés rapidement, l'efficacité des opérations en sera affectée. En outre, la réduction de la charge supportée par les robots est un sujet clé dans l'intégration de nombreux systèmes d'assemblage.
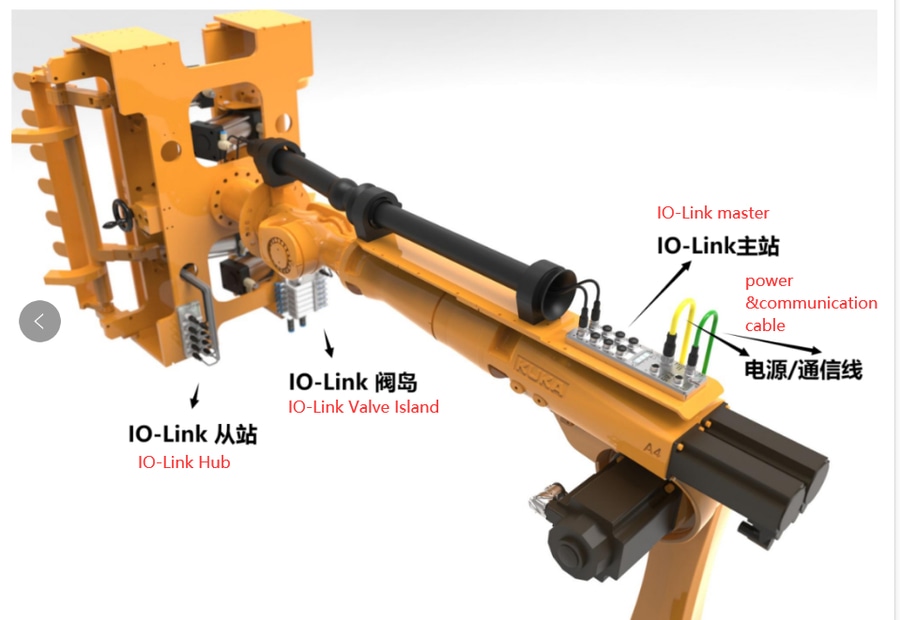
La technologie IO-Link de Fuyansheng peut résoudre efficacement les problèmes de connexion des robots industriels à articulations multiples. Cette technologie peut simplifier l'installation et la maintenance des robots, réduire le nombre de câbles et améliorer la stabilité et l'efficacité opérationnelle de l'ensemble du système. On pense qu'avec la popularisation et le développement de l'automatisation industrielle, la technologie IO-Link de Fuyansheng sera plus largement utilisée.
Compte tenu des difficultés susmentionnées, nous recommandons la technologie Fuyansheng IO-Link, qui peut résoudre les problèmes susmentionnés d'un seul coup sous les deux aspects suivants
Intégration de la pince du robot et position fixe de la station principale
1. Support de charge du corps du robot : Nous pouvons installer un cadre fixe au niveau de l'articulation du coude du robot. Cela permet d'établir une connexion de transition entre le préhenseur, le signal de l'extrémité de l'appareil et l'extrémité du contrôleur. Cette approche permet non seulement de réduire efficacement l'espace nécessaire à l'installation du robot, mais aussi de réduire le nombre de câbles résistants à la torsion dans l'ensemble de la tuyauterie. Par conséquent, le nombre de câbles peut être réduit et l'installation est simplifiée.
2. Intégration des signaux au niveau de la pince et de la fixation : En ce qui concerne la méthode de connexion pour l'intégration des signaux à l'extrémité de la base du robot dans l'armoire de commande, nous utilisons une combinaison de conceptions compactes telles que M12, 7/8" base de bride, connecteurs robustes et cartes de câblage. Les composants, qui peuvent s'adapter à la transmission d'énergie, de données et de signaux, peuvent également faire face à des conditions environnementales difficiles. Du côté de l'armoire de commande, nous utilisons généralement des câbles de connexion du panneau avant, qui permettent une connexion rapide et facilitent l'isolation et la maintenance.





