Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Tendances produits
{{{sourceTextContent.title}}}
Révéler le secret de la haute tension "douce" derrière l'impression à jet unique alimentée par courant alternatif
{{{sourceTextContent.subTitle}}}
Nom de l'expérience : Test de performance des actionneurs à élastomère diélectriqueOrientation de la recherche:Atténuer les effets de l'utilisation de l'élastomère diélectrique sur la santé
{{{sourceTextContent.description}}}
Nom de l'expérience : Test de performance des actionneurs à élastomère diélectrique
Orientation de la recherche :
Pour atténuer les caractéristiques d'hystérésis papillon et de fluage des actionneurs à élastomère diélectrique, cet article propose un nouvel algorithme de contrôle de rétroaction de sortie basé sur une compensation inverse implicite pour l'hystérésis papillon et les effets de fluage. L'algorithme de compensation inverse implicite est un mécanisme de découplage en ligne qui dérive un signal de commande réel approximatif du signal de commande temporaire affecté par l'hystérésis et le fluage. Tout d'abord, un modèle d'hystérésis papillon avec effets de fluage a été développé pour l'actionneur en élastomère diélectrique. Enfin, en appliquant des techniques d'initialisation pour définir les valeurs initiales de la loi adaptative et des signaux de commande virtuels, on a obtenu une erreur de suivi L limitée. Les résultats de la validation expérimentale démontrent l'efficacité du schéma de contrôle proposé.
Objectif de l'expérience :
Tester les performances de l'actionneur en élastomère diélectrique et évaluer s'il peut atteindre l'effet désiré sous haute tension, en fournissant une base pour les expériences ultérieures.
Matériel d'essai :
Film élastomère diélectrique, capteur de déplacement laser, contrôleur de capteur, amplificateur haute tension, ordinateur, etc.
Procédure expérimentale :
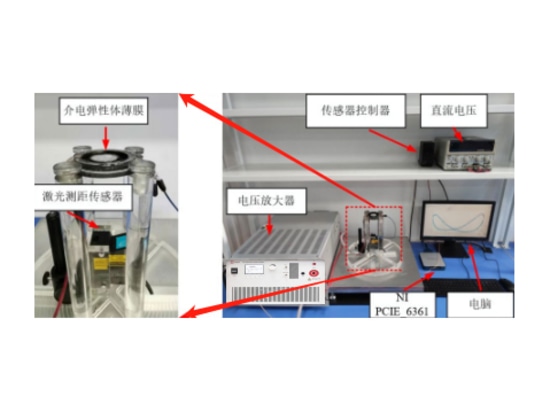
Sur la base de l'actionneur en élastomère diélectrique fabriqué, une plate-forme d'essai a été établie à l'aide d'un capteur de déplacement laser, d'un amplificateur haute tension, d'une carte d'acquisition de données entrée/sortie multifonctionnelle et d'autres équipements, comme le montre la figure ci-dessous.
Plate-forme d'essai de l'élastomère diélectrique
Figure : Plate-forme d'essai de l'élastomère diélectrique
Le système d'actionnement de l'élastomère diélectrique est décrit comme suit :
Un film d'élastomère diélectrique a été pré-étiré biaxialement d'un facteur 4 et fixé à un cadre circulaire en polyméthacrylate de méthyle. De la graisse conductrice au carbone a été appliquée des deux côtés du film d'élastomère diélectrique, avec un diamètre intérieur de 40 mm et un diamètre extérieur de 60 mm. Une charge en PMMA a ensuite été placée au centre du film d'élastomère diélectrique, où aucune graisse conductrice au carbone n'a été appliquée.
Le dispositif expérimental comprenait
Le système d'actionnement de l'élastomère diélectrique annulaire
Un capteur de déplacement laser installé pour mesurer le déplacement de la charge
Un moniteur de capteur (LK-G5001P, Keyence) connecté au capteur laser pour recevoir les données de mesure
Un amplificateur haute tension qui amplifie le signal d'entrée de 1000 fois
Un dispositif d'entrée/sortie multifonctionnel pour la transmission et l'enregistrement des données d'entrée et de sortie
Résultats expérimentaux :
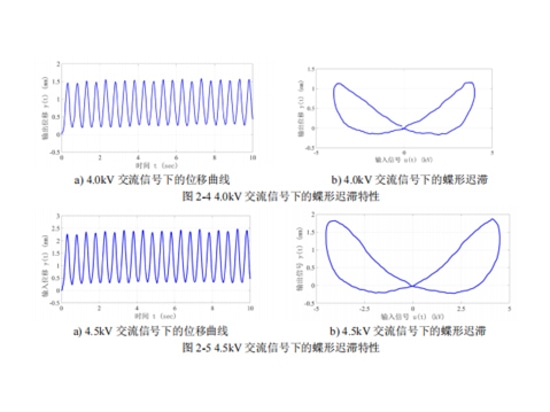
Les essais expérimentaux ont révélé que lorsque l'amplitude de la tension de commande sinusoïdale dépassait 3 kV, l'actionneur à élastomère diélectrique présentait une déformation importante. Les figures 2-3 à 2-5 montrent la déformation de l'élastomère diélectrique sous des tensions de commande sinusoïdales de 3,5 kV, 4,0 kV et 4,5 kV, respectivement. D'après les mesures du capteur de déplacement laser, la déformation maximale induite électriquement de l'actionneur en élastomère diélectrique a dépassé 900 %.
26
26
Les résultats des essais sont présentés à la figure 2-3. La figure 2-3(a) présente les résultats expérimentaux du déplacement de sortie de l'actionneur à élastomère diélectrique sous une tension de commande sinusoïdale de 3,5 kV à 1 Hz, tandis que la figure 2-3(b) montre la réponse d'entrée-sortie de l'élastomère diélectrique dans ces conditions de commande. On peut observer que sous une tension d'entraînement sinusoïdale, l'élastomère diélectrique présente un phénomène d'hystérésis à double boucle, qui diffère de l'hystérésis à boucle unique observée dans les actionneurs traditionnels en matériaux intelligents rigides. Les figures 2-4(a) et 2-5(a) montrent les résultats expérimentaux du déplacement de sortie de l'actionneur en élastomère diélectrique sous des tensions d'entraînement sinusoïdales de 4,0 kV et 4,5 kV à 1 Hz, respectivement. Les figures 2-4(b) et 2-5(b) illustrent les réponses entrée-sortie de l'élastomère diélectrique dans ces conditions de commande. Il est évident que le phénomène d'hystérésis papillon de l'actionneur en élastomère diélectrique présente des changements non linéaires sous des tensions d'entraînement d'amplitudes différentes.
Amplificateur haute tension recommandé : Amplificateur haute tension ATA-7050
Spécifications et paramètres de l'amplificateur haute tension ATA-7050
Figure : Spécifications et paramètres de l'amplificateur haute tension ATA-7050
{{medias[223022].description}}
{{medias[223023].description}}