Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Tendances produits
Des actionneurs linéaires électriques de haute puissance dans un petit boîtier
Les concepteurs de machines destinées aux applications mobiles hors route, à la manutention, à l'automatisation des usines et à d'autres applications gourmandes en énergie peuvent désormais disposer d'actionneurs électriques fournissant jusqu'à deux kilonewtons (kN) / 450lbs de force (lbf) avec une électronique embarquée avancée
Les actionneurs linéaires électromécaniques offrent de plus en plus de puissance et d'intelligence dans des facteurs de forme plus petits. L'intégration d'une plus grande capacité de contrôle du mouvement dans une enveloppe plus compacte a donné naissance à une nouvelle génération d'actionneurs à haute densité de puissance. Les concepteurs de machines pour les applications mobiles hors route, la manutention, l'automatisation des usines et d'autres applications gourmandes en énergie peuvent maintenant obtenir des actionneurs électriques fournissant jusqu'à deux kilonewtons (kN) / 450lbs de force (lbf) avec une électronique embarquée avancée ̶ le tout dans un composant nécessitant moins d'espace et plus rentable que les actionneurs hydrauliques ou électromécaniques plus lourds qui auraient pu être déployés auparavant pour de telles applications.
La convergence des tendances industrielles suivantes stimule la demande d'actionneurs linéaires à densité de puissance plus élevée :
- Les concepteurs d'automatisation industrielle cherchent à actionner des charges plus lourdes dans des espaces plus restreints sans les exigences environnementales et de maintenance des actionneurs hydrauliques ;
- Les ingénieurs systèmes recherchent des informations de fonctionnement et de diagnostic plus précises pour optimiser les performances et relever des défis plus complexes en matière de contrôle du mouvement ;
- Les équipementiers s'efforcent de concevoir des machines plus complexes dans un ensemble plus condensé, ce qui leur offre une plus grande flexibilité et une meilleure rentabilité
Premiers pas vers un contrôle du mouvement plus efficace en termes d'espace
Les concepteurs d'applications nécessitant plus de 2 kN / 450 lbf dans une enveloppe compacte ont traditionnellement utilisé l'hydraulique, la pneumatique ou même une solution électromécanique servo-commandée. Toutefois, ces systèmes nécessitaient également l'intégration de nombreux composants externes, tels que des moteurs, des pompes, des réservoirs et des tuyaux. Le fait que ces systèmes soient également coûteux à entretenir en raison des fuites de fluide a contribué à la demande d'alternatives.
Au cours des 20 dernières années, les actionneurs électromécaniques industriels ont élargi leur offre de force jusqu'à 16 kN / 3597 lbf afin de permettre une conversion hydraulique accrue. Cette puissance est complétée par l'intégration de l'électronique embarquée qui, en plus d'aider à fournir le contrôle du mouvement nécessaire pour augmenter les performances à des niveaux plus élevés, permet également de définir par logiciel les équipements externes encombrants tels que les encodeurs, les relais et les commutateurs afin qu'ils puissent être gérés dans le boîtier de l'actionneur. Cela élimine l'espace requis par ces dispositifs et leur câblage, ce qui donne au concepteur de la machine beaucoup plus de flexibilité.
Réduire l'encombrement
Alors que le marché a accueilli des actionneurs plus puissants capables de convertir des axes traditionnellement hydrauliques en axes électromécaniques, de nombreux fournisseurs de systèmes mobiles hors route, de manutention et d'automatisation industrielle ont également exigé une conception plus compacte pour répondre aux besoins de leur clientèle. D'une manière générale, les machines deviennent de plus en plus complexes tout en étant de plus en plus compactes. Les fournisseurs de technologies de commande de mouvement ont réagi en réalisant des progrès en matière d'engrenage, de dimensionnement des moteurs, d'électronique embarquée et d'autres innovations qui ont donné naissance à une nouvelle race d'actionneurs électromécaniques dont la taille globale a diminué par rapport à leurs prédécesseurs traditionnels, tout en augmentant la densité de puissance.
Et avec une puissance plus élevée, ces actionneurs électromécaniques plus compacts conservent toute l'intelligence intégrée dans leurs homologues plus grands ̶ un différentiateur clé par rapport aux actionneurs à base de fluide. Les avantages de la commande électronique comprennent de nombreux outils d'automatisation et de maintenance tels que le retour d'information sur la position, les communications par bus CAN J1939 et bus LIN, la commutation à faible courant, la sortie d'indication de fin de course, la synchronisation multi-actionneurs et l'option d'utilisation avec des PLC.
Thomson Industries, par exemple, a conçu un actionneur électromécanique pour des charges allant jusqu'à 2 kN / 450 lbf qui possède toutes les mêmes capacités électroniques qu'un modèle pouvant supporter 16 kN / 3597 lbf, mais dans un boîtier plus petit.
Choisir des actionneurs à haute densité de puissance
Alors que la sélection d'un actionneur commence traditionnellement par la détermination de la charge, de la longueur de course et de la vitesse requises, de nombreux concepteurs de systèmes de contrôle du mouvement constatent que les contraintes d'espace constituent l'un de ces facteurs de sélection de base. Dans certains cas, les charges requises peuvent augmenter ou se maintenir à des niveaux plus élevés parce que les géométries des machines ne changent pas beaucoup, ce qui oblige les concepteurs à faire un compromis entre la taille et la force requise. Le fait que le respect des contraintes de taille puisse en fait nécessiter une force plus importante complique le défi.
Les véhicules mobiles hors route sont un bon exemple d'une catégorie d'applications bénéficiant d'un actionneur plus petit. Les véhicules plus petits ont tendance à être plus faciles à manipuler, plus économes en énergie et peuvent souvent être plus rentables, en particulier si les concepteurs n'ont pas à fournir une capacité de charge supérieure à celle réellement requise pour la tâche à accomplir
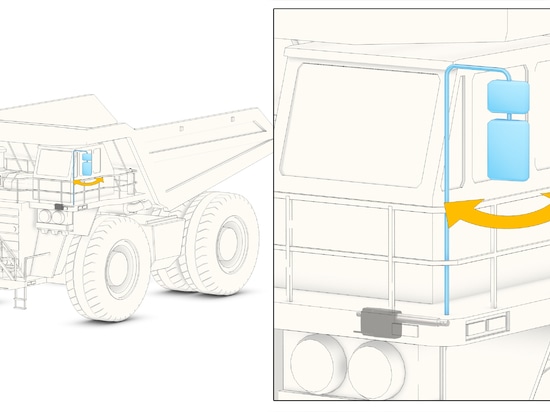
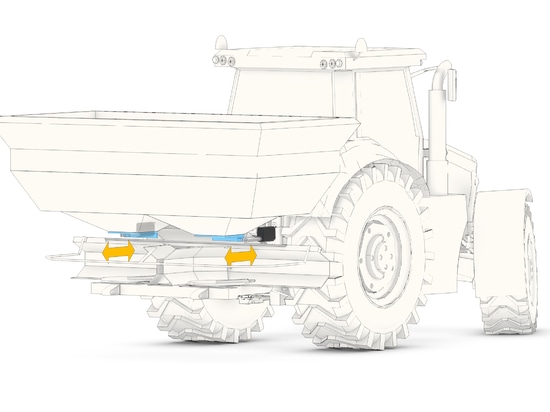
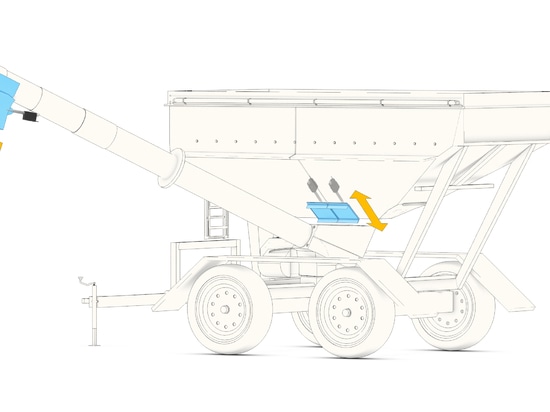
Une moissonneuse-batteuse, par exemple, peut avoir certains composants qui nécessitent jusqu'à 16 kN / 3597 lbf, mais d'autres équipements mobiles qui n'en ont pas besoin. Des systèmes tels que le tamis, qui permet de séparer le grain consommable de la paille, ou le déflecteur de vent, qui dirige la paille vers la gauche ou la droite de la moissonneuse-batteuse en fonction de la direction du vent, peuvent encore nécessiter une gestion de la charge plus lourde, mais beaucoup moins que 3597 lbf. Ces équipements sont souvent situés dans des parties du véhicule où l'espace est limité, et tout ce qui peut être fait pour optimiser cet espace serait le bienvenu.
Les mécanismes de verrouillage dans les systèmes de manutention et les ajustements ergonomiques sur un convoyeur sont d'autres applications qui peuvent bénéficier d'actionneurs à densité de puissance plus élevée. De nombreuses applications de ce type pourraient utiliser un dispositif capable de gérer des charges allant jusqu'à 2 kN / 450 lbf, mais qui n'aurait que rarement, voire jamais, besoin d'approcher une capacité de 16 kN / 3597 lbf
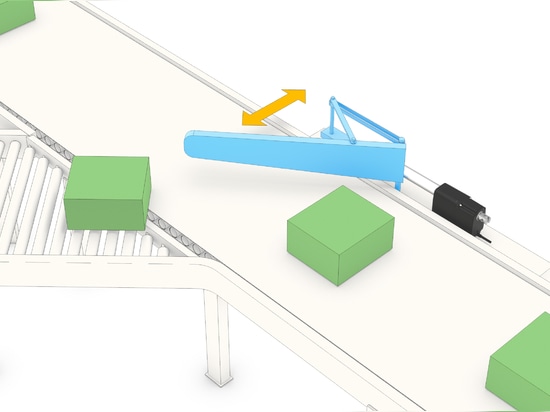
Un autre exemple d'automatisation pourrait être un actionneur utilisé pour lever ou abaisser un convoyeur lourd pour manipuler des cartons de différentes tailles. De telles opérations peuvent n'être nécessaires que quelques fois par jour et les automatiser avec un système lourd ne serait probablement pas rentable. Un système à densité de puissance plus élevée, cependant, offrirait un actionneur plus efficace dans un encombrement plus réduit, ce qui pourrait apporter les avantages de l'automatisation à un environnement d'exploitation auparavant manuel, potentiellement dangereux et - par rapport aux actionneurs à fluide - plus sinistre.
Aller de l'avant
D'une manière générale, la nouvelle génération d'actionneurs de petite taille et à haute densité de puissance est idéale pour les applications nécessitant jusqu'à 2 kN / 450 lbf de capacité et d'intelligence embarquée. Au-delà, il faudra probablement recourir à un actionneur électromécanique plus grand, à la synchronisation de plusieurs actionneurs intelligents ou, si la propreté et la précision ne sont pas essentielles, à une solution alimentée par fluide. Si l'intelligence embarquée n'est pas essentielle et que la charge requise est inférieure à 0,5 kN / 112 lbf, un actionneur électromécanique plus basique peut s'adapter aux contraintes d'espace disponibles.
Même si l'espace n'est pas une considération primordiale, réduire la taille d'un composant sans sacrifier la puissance ou l'intelligence peut apporter une valeur ajoutée au produit final en termes de flexibilité, de coût, de consommation d'énergie et de maintenance. Sans un actionneur intelligent de plus petite densité, les options sont de mettre en œuvre un actionneur plus grand ou de limiter la fonctionnalité. Avec un actionneur plus compact, il y aura moins de compromis de conception. Les concepteurs auront la puissance dont ils ont besoin, ainsi qu'un meilleur accès aux données de fonctionnement et la possibilité de se synchroniser avec d'autres actionneurs.
Comme l'Internet industriel des objets et les initiatives de l'industrie 4.0 favorisent le développement d'applications plus connectées et intelligentes, la demande d'actionneurs plus compacts est susceptible d'augmenter. Et cela s'accompagne d'une capacité accrue à intégrer des mécanismes auparavant isolés et à mettre à l'échelle les systèmes de contrôle du mouvement pour une flexibilité maximale et un avantage en termes de coûts.