#Tendances produits
Capteurs de Couple Intégrés vs. Externes dans les Modules d’Articulations Robotiques : Principaux Compromis Techniques pour les Robots Humanoïdes et Collaboratifs
Cet article explore les compromis techniques entre les capteurs de couple intégrés et externes dans les modules d’articulations robotiques, en comparant leur impact sur la compacité, la fiabilité, les performances dynamiques, la maintenance et les fu
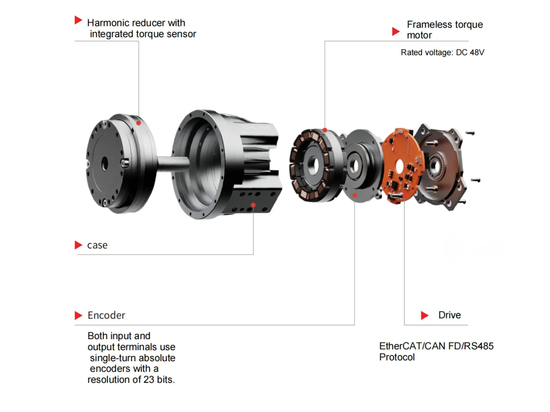
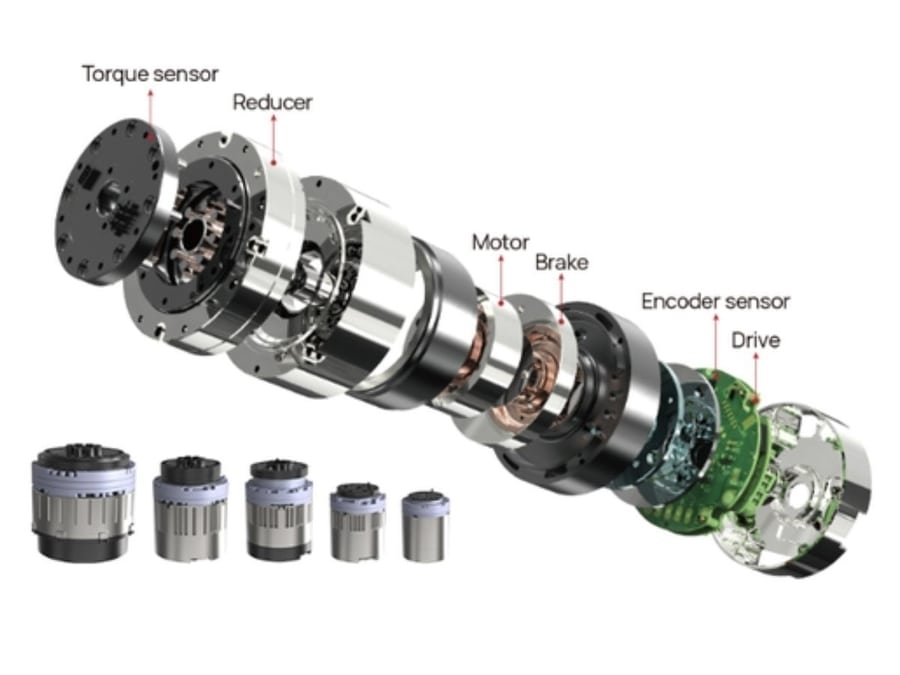
Avec l’évolution rapide des robots humanoïdes et collaboratifs, les capteurs de couple sont devenus essentiels pour assurer un contrôle précis des forces et une interaction souple et sécurisée. Cet article analyse les deux principales architectures de détection de couple utilisées dans les modules d’articulations robotiques : les capteurs de couple intégrés, profondément incorporés dans la structure de l’articulation afin d’offrir compacité, haute fiabilité et excellentes performances dynamiques, et les capteurs de couple externes, qui offrent davantage de flexibilité, une maintenance simplifiée et une forte pertinence pour les environnements de recherche et de validation. En comparant leurs méthodes d’intégration, avantages, limites et scénarios d’application, l’article met en évidence les principaux compromis techniques entre intégration, évolutivité, maintenance et performance, afin d’aider les ingénieurs en robotique à choisir la solution de détection la plus adaptée aux systèmes robotiques de nouvelle génération.