#Tendances produits
Actionneurs linéaires vs actionneurs rotatifs : Le choix central pour les articulations des robots humanoïdes
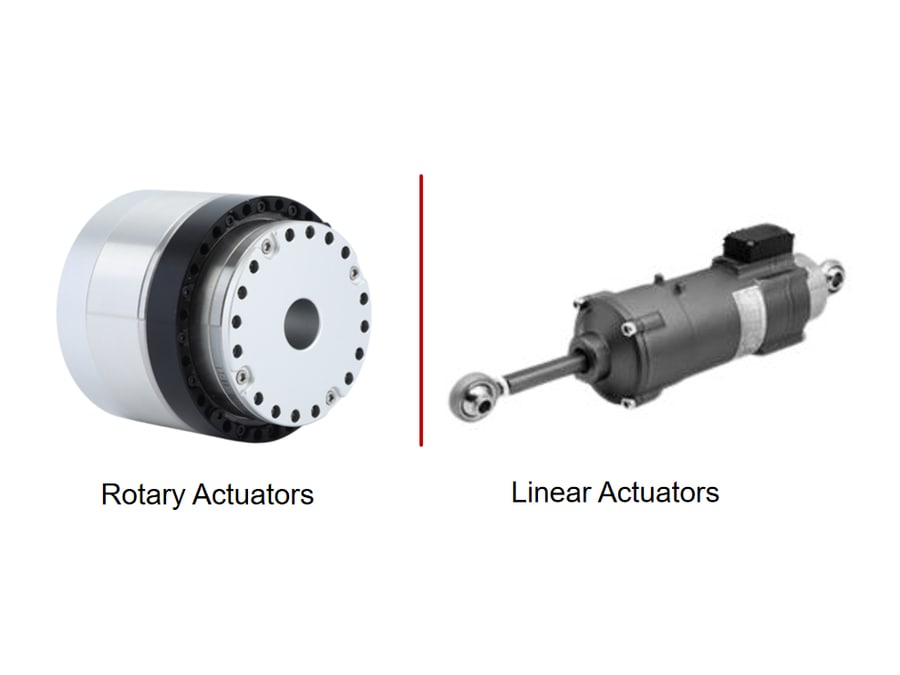
Les modules articulaires des robots humanoïdes peuvent être largement classés en actionneurs rotatifs et linéaires, chacun adapté à des applications et exigences de charge spécifiques.
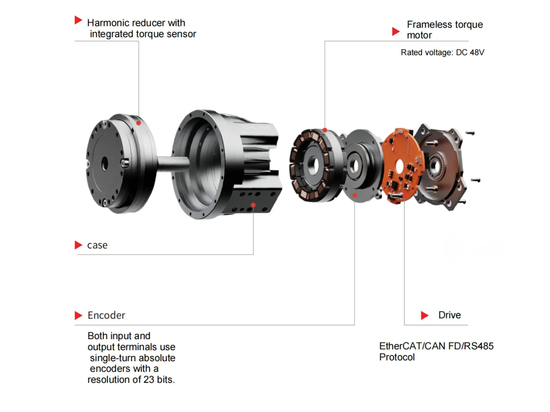
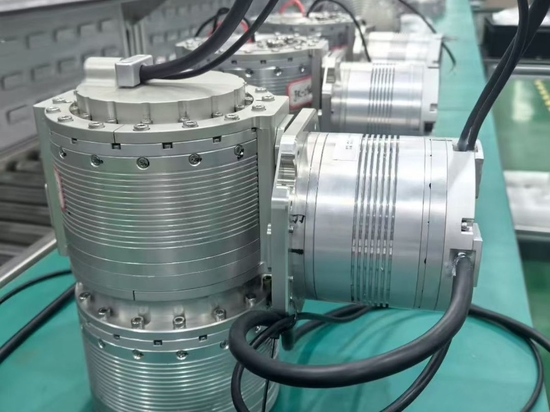
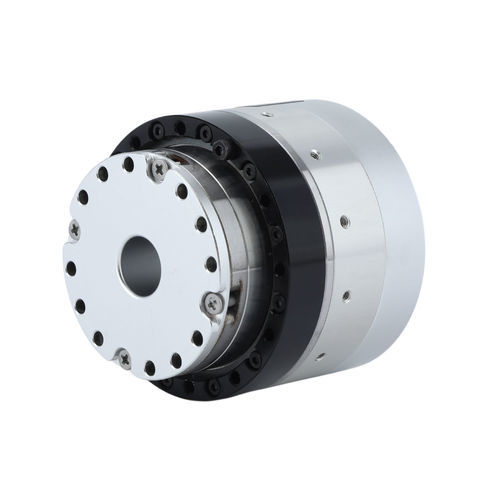
Les actionneurs rotatifs, utilisant souvent des réducteurs harmoniques, planétaires ou cycloïdaux, offrent un couple élevé, de larges angles de rotation, de fortes performances dynamiques et une intégration élevée, ce qui les rend idéaux pour les épaules, les hanches et la taille. Les actionneurs linéaires, utilisant des vis à rouleaux planétaires ou des vis à billes, convertissent le mouvement rotatif en mouvement linéaire et excellent en précision et rigidité pour les articulations avec de petits angles de mouvement, comme les genoux, les coudes et les chevilles, mais présentent une dynamique plus faible et des coûts d’intégration plus élevés. En fin de compte, les deux types d’actionneurs présentent des avantages selon les besoins de mouvement, les contraintes structurelles et les priorités de performance, les actionneurs rotatifs — en particulier ceux à réducteur harmonique — restant actuellement le choix dominant pour la conception des articulations des robots humanoïdes.