#Tendances produits
Assemblage robotisé de connecteurs haute tension pour véhicules électriques
Un chef-d’œuvre pour le Mexique
Six robots Stäubli fixés au plafond, treize systèmes de traitement d’image et tout le savoir-faire du constructeur de l’usine assurent l’assemblage et le test rapides, sûrs et économiques de 5 000 000 de connecteurs haute tension pour véhicules électriques et hybrides au Mexique.
PROBLÉMATIQUE
Assemblage robotisé de connecteurs haute tension pour véhicules électriques
L’assemblage de cinq millions de connecteurs haute tension par an pour les véhicules électriques et hybrides impose des exigences élevées en matière d’automatisation, et ce surtout lorsque les changements de références sont quotidiens. Un système novateur assure une production très flexible.
Tout le monde parle d’électromobilité. Cela stimule également la demande de solutions d’assemblage pour les composants électroniques de la part de constructeurs de machines spéciales tels que Eberhard AG. Un fournisseur automobile international a ainsi proposé un projet ambitieux à l’entreprise allemande basée à Schlierbach.
Concrètement, la tâche consistait à planifier et à réaliser un système d’assemblage pour 5 000 000 de connecteurs haute tension par an. Le système devait réaliser non seulement l’assemblage à proprement parler, mais également le contrôle visuel de chacune des étapes d’assemblage ainsi que le test d’étanchéité des broches et enfin leur conditionnement en plateaux.
SOLUTION
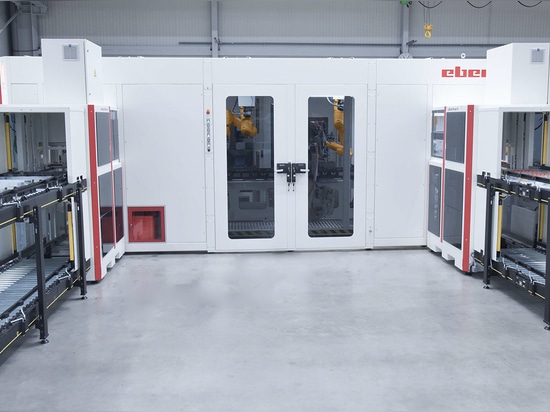
Un chef-d’œuvre d’automatisation doté d’un design compact
Quand on voit pour la première fois le système, une question vient à l’esprit : comment une ligne d’assemblage de 13 postes avec six robots et 13 systèmes de vision a-t-elle pu être réalisée dans un espace aussi réduit ? Voici la réponse : suspendre les robots au-dessus des stations contribue à une exploitation efficace de l’espace.
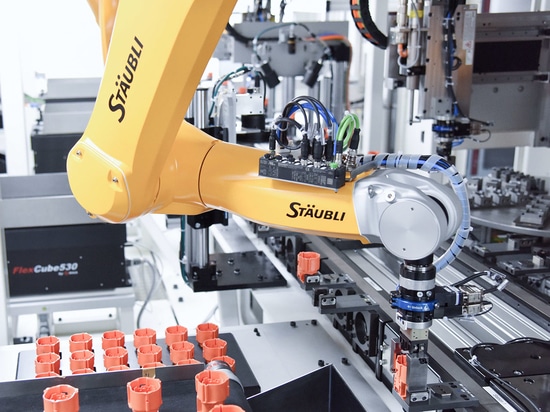
Les six robots sont des robots Stäubli six axes de haute précision, modèle TX2-60L, une variante à portée étendue. Les robots ont été choisis non seulement pour leur dynamique, mais aussi pour leur conception compacte, leurs interfaces avec les systèmes d’alimentation flexibles et les caméras, et leur fiabilité incomparable. Quatre des six robots sont équipés de systèmes de caméras pour prélever les pièces dans les systèmes d’alimentation flexibles.
L’assemblage des broches repose sur un concept clair : chaque étape de travail est suivie d’un contrôle de qualité. Exemple du poste 1 : ici, le premier robot TX2-60L prend un boîtier de connecteur sur un convoyeur et le place dans un porte-pièces dans lequel il va transiter par toutes les stations du système. Au poste 2, un contrôle de qualité optique est immédiatement effectué pour vérifier le codage et la couleur.
Avec un contrôle tout de suite après l’assemblage - c’est sur ce principe que le boîtier du connecteur passe par toutes les autres stations jusqu’à son achèvement. Avant que le dernier des six robots Stäubli ne transfère le connecteur haute tension entièrement assemblé vers un système de palettisation, un test d’étanchéité est effectué. Afin de pouvoir maintenir le temps de cycle à ce stade, Eberhard s’appuie sur un plateau rotatif à quatre stations et un adaptateur d’essai quadruple. Grâce à cette solution, le contrôle ne devient pas un goulot d’étranglement.
UTILISATION DU CLIENT
Conversion en dix minutes
Dans un premier temps, seules trois références passeront par le système, mais leur nombre va rapidement largement augmenter. Grâce à la conception très flexible de la ligne, l’utilisateur peut envisager sereinement cette évolution. Le passage d’une référence à la suivante se fait en dix minutes.
Dès la pré-mise en service du système, le temps de cycle requis de trois secondes a pu être réduit. Actuellement, le temps de cycle du système est d’environ 2,7 secondes par connecteur haute tension, ce qui correspond exactement à la simulation précédente, réalisée en étroite collaboration avec Stäubli Robotics. Le fait que le résultat de la simulation corresponde à cent pour cent à la réalité souligne la précision avec laquelle les processus peuvent être simulés aujourd’hui - à condition d’utiliser les bons outils. Eberhard voit d’ailleurs encore un potentiel d’optimisation des temps de cycle dans le réglage minutieux du système sur site.