Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Actualités du secteur
{{{sourceTextContent.title}}}
Qu'est-ce que la cartographie mobile ?
{{{sourceTextContent.subTitle}}}
Un guide complet pour les débutants
{{{sourceTextContent.description}}}
La cartographie mobile est l'une des utilisations les plus passionnantes de la technologie de localisation, en particulier de la technologie GNSS/INS comme la nôtre. Ce blog est conçu pour être l'ultime introduction à la cartographie mobile pour tous ceux qui souhaitent en savoir plus sur la technologie de la cartographie mobile et les systèmes de cartographie tels que le LiDAR mobile. Qu'est-ce que la cartographie mobile ?
Qu'est-ce que la cartographie mobile ?
Toute activité qui consiste à effectuer des relevés à partir d'un véhicule en mouvement est un type de cartographie mobile. D'une manière générale, la cartographie mobile se divise en deux catégories : les activités de cartographie terrestre et les activités de cartographie aérienne. La cartographie mobile terrestre, également appelée parfois cartographie mobile routière, est une activité qui consiste à effectuer des relevés à partir d'une voiture. Les voitures de Google Streetview sont probablement l'un des exemples les plus connus de cartographie mobile sur route.
La cartographie aérienne, bien sûr, est un relevé effectué depuis les airs. Il peut s'agir d'un petit drone quadricoptère ou d'un avion plus gros, avec ou sans pilote.
Technologie clé de la cartographie mobile
Toute charge utile de cartographie mobile (c'est-à-dire l'ensemble des capteurs et de la technologie utilisés pour l'étude) comporte des éléments communs :
1. Les capteurs utilisés pour recueillir les données de l'enquête
2. La solution de localisation
Le processus de combinaison de ces deux ensembles de données est connu sous le nom de géoréférencement. Une fois que les données d'enquête ont été géoréférencées, elles ont reçu une position fixe sur la terre, ce qui signifie que les données peuvent être utilisées aux fins prévues.
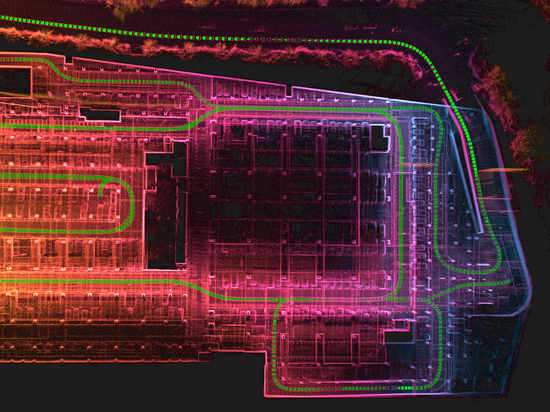
Un large éventail de capteurs peut être utilisé pour les levés. Historiquement, le plus courant est l'appareil photo, qui crée une image photographique comme résultat de l'enquête. Plus récemment, le LiDAR (Light Detection And Ranging) est devenu une méthode d'arpentage populaire. Le LiDAR utilise des lasers pour mesurer la distance entre le capteur et les objets de l'environnement, produisant des millions (voire des milliards) de "points" qui constituent le levé. Le résultat final d'un LiDAR est connu sous le nom de nuage de points, qui ressemble à un modèle 3D de la zone étudiée.
Par ailleurs, presque tous les capteurs peuvent être utilisés pour effectuer des levés. Le radar et l'imagerie hyperspectrale sont souvent utilisés, mais nous avons déjà travaillé avec des clients pour les aider à géoréférencer des données provenant de toute une série de capteurs différents, y compris des équipements de détection de gaz. Tant que vous pouvez géoréférencer les données à l'aide de votre technologie de localisation, vous pouvez utiliser votre capteur dans le cadre d'une enquête.
Localisation par cartographie mobile
De nos jours, la méthode de localisation la plus répandue pour la cartographie mobile est une combinaison de données GNSS et d'une unité de mesure inertielle (IMU).
GNSS signifie Global Navigation Satellite System (système mondial de navigation par satellite) et fait référence aux constellations de satellites dans l'espace qui fournissent des données de position. Le GPS, par exemple, est un exemple de GNSS.
En savoir plus sur le GNSS
Un IMU est un ensemble de gyroscopes et d'accéléromètres qui mesurent les changements de vitesse, d'accélération et de moment angulaire, utilisés pour estimer le cap, la vitesse et l'orientation (entre autres) d'un objet. Un IMU combiné à des données GNSS est généralement appelé système de navigation inertielle assisté par GNSS, ou GNSS/INS. La combinaison des deux rend le système plus robuste : l'INS vous permet d'identifier toute erreur dans vos données satellitaires, peut-être due à une baisse de la couverture satellite, tandis que le GNSS corrige la dérive progressive de la position à laquelle toute IMU est sujette.
Comment fonctionne la cartographie mobile ?
En règle générale, le processus de cartographie mobile comprend les étapes suivantes :
1. Mise en place : construisez votre charge utile d'arpentage, en veillant à ce que vos capteurs soient étroitement intégrés afin d'obtenir des résultats de la meilleure qualité possible.
2. Collecte des données : effectuez votre relevé, que ce soit sur terre ou dans les airs, en recueillant les données de relevé et de localisation en temps réel.
3. Traitement : une fois les données recueillies, vous devez combiner les deux ensembles de données pour produire un résultat final. Cette étape comporte plusieurs sous-étapes : vous exécuterez probablement des algorithmes de post-traitement sur vos données de localisation afin d'en maximiser la précision, puis vous effectuerez une étape de géoréférencement distincte au cours de laquelle les données de position seront combinées avec les données d'arpentage.
Les spécificités du flux de travail varient en fonction du capteur utilisé. Par exemple, si vous utilisez un dispositif LiDAR mobile, vous devrez ajouter une étape d'étalonnage de l'axe de visée avant d'effectuer le levé, afin d'aligner précisément le scanner LiDAR et votre GNSS/INS, pour éviter les images floues.