Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Livres blancs
{{{sourceTextContent.title}}}
Moteur à fente et moteur sans fente :
{{{sourceTextContent.subTitle}}}
Quelle est la différence ? (1ère partie)
{{{sourceTextContent.description}}}
Si vous lisez cet article, il y a de fortes chances que vous soyez déjà familiarisé avec les différents types de moteurs électriques et que vous ayez déjà rencontré le terme "moteur slotless". Si ce n'est pas le cas, ne vous inquiétez pas, cet article commencera par une explication rapide.
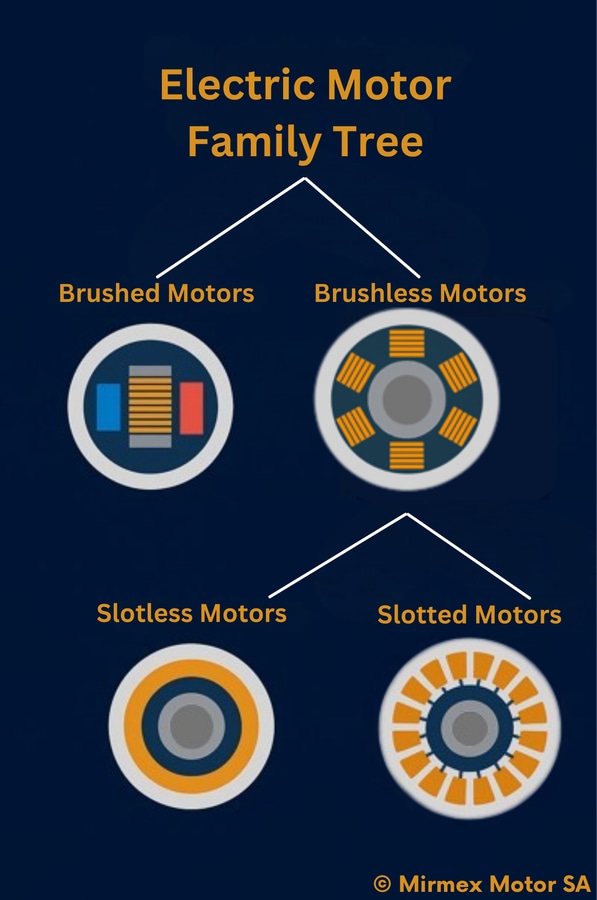
Comme de nombreux autres composants technologiques, les moteurs électriques ont leur propre arbre généalogique qui permet de les distinguer les uns des autres.
Tout comme vous pouvez faire la différence entre un moteur sans balais et un moteur à balais, les moteurs électriques peuvent également être classés comme étant à fente ou sans fente.
Comme leur nom l'indique, et à l'instar des moteurs sans balais qui n'ont pas de balais, les moteurs sans encoches sont fabriqués sans les encoches (les rainures dans le noyau du stator) présentes dans les modèles conventionnels. Dans l'image ci-dessus, vous pouvez observer ce concept de manière simplifiée à travers un diagramme de moteur électrique sans balais.
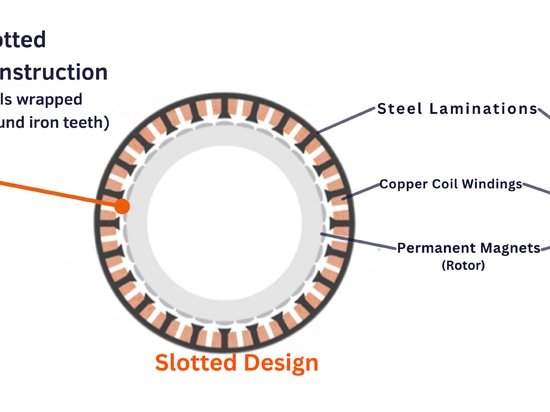
En règle générale, un moteur à encoches comporte des rainures dans le noyau du stator. Ces rainures maintiennent physiquement les enroulements porteurs de courant, qui agissent comme des électro-aimants - lorsque le courant les traverse, ils génèrent des champs électromagnétiques.
Outre leur rôle structurel de fixation des enroulements, ces rainures contribuent également à guider le flux magnétique vers l'entrefer.
L'entrefer, qui est l'espace entre le rotor et le stator, est la région critique où le flux magnétique provenant à la fois des enroulements du stator (via les rainures) et des aimants du rotor interagit. C'est cette interaction qui, en fin de compte, entraîne le moteur. Ce concept est clairement illustré dans l'image ci-dessous.
En revanche, les moteurs sans fente ou communément appelés "moteurs sans noyau" utilisent une approche différente. Les moteurs sans fente ou sans noyau sont ceux vendus par Mirmex.
Ces moteurs sans fente ne contiennent pas de noyau d'acier avec des rainures et s'appuient uniquement sur la géométrie des enroulements du moteur pour amplifier le flux magnétique. En général, la disposition des enroulements est plus simple, comme illustré ci-dessous. En général, la conception à fentes améliore la création de champs électromagnétiques autour des enroulements en cuivre, ce qui se traduit par un flux magnétique plus élevé dans l'entrefer.
Cette géométrie spécifique présente à la fois des avantages et des inconvénients, que nous examinerons plus en détail tout au long de cet article. Ces avantages et inconvénients peuvent être particulièrement pertinents en fonction de l'application.
Comparaison des moteurs à fente et sans fente, montrant les enroulements autour des dents en fer dans la construction à fente et les composants étiquetés comme les tôles d'acier, les enroulements en cuivre et les aimants permanentsCouple d'entraînement
L'une des principales différences entre les moteurs à fente et les moteurs sans fente réside dans leur souplesse de rotation.
Dans les moteurs à fentes, comme expliqué précédemment, les fentes redirigent le flux magnétique à travers leur forme, en l'amplifiant localement. Cela crée des régions de flux magnétique plus élevé qui interagissent avec les pôles magnétiques du rotor. Lorsque le rotor tourne, ces interactions provoquent une perturbation périodique connue sous le nom de couple de cogging - un effet de "hoquet" qui perturbe la fluidité de la rotation.
Les moteurs sans fentes, en revanche, éliminent ce problème. Comme il n'y a pas de fentes pour concentrer le flux magnétique dans des régions spécifiques, le champ magnétique reste plus uniforme. Par conséquent, un moteur électrique sans encoches ne présente aucun couple de cogging, ce qui se traduit par une rotation parfaitement régulière.
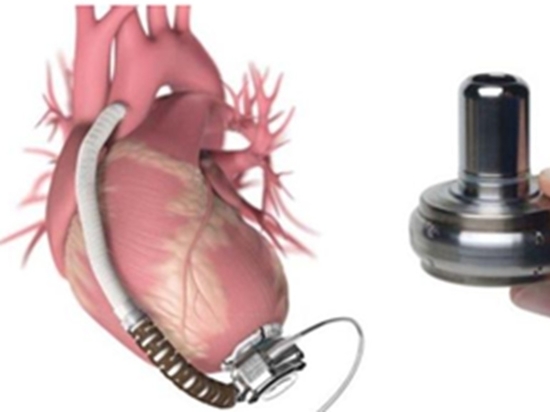
Cette fluidité se traduit par de bonnes performances NVH, telles qu'un faible niveau de bruit, des vibrations minimales et une meilleure contrôlabilité, ce qui permet un contrôle plus précis des mouvements. Ces caractéristiques rendent les moteurs sans fente particulièrement intéressants pour les applications qui exigent une grande précision et un fonctionnement silencieux, comme les moteurs pour prothèses, les moteurs pour outils chirurgicaux et les moteurs pour outils médicaux en général.
Après avoir présenté les concepts de base des moteurs électriques avec et sans fente et souligné les principales différences entre eux, nous vous invitons à lire la deuxième partie de cette série de blogs, où nous nous pencherons plus en détail sur les facteurs de performance spécifiques qui les distinguent les uns des autres.
Bien que nos moteurs soient exempts de cogging, assurez-vous d'être connecté pour le prochain article !