Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Actualités du secteur
{{{sourceTextContent.title}}}
Mouvement linéaire pour la manipulation robotique dans les entrepôts automatisés
{{{sourceTextContent.subTitle}}}
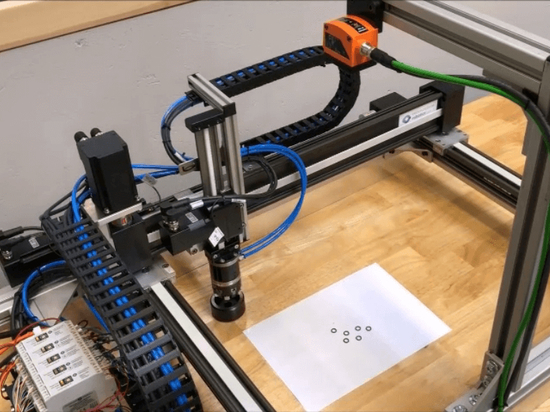
Bras de transfert
{{{sourceTextContent.description}}}
En concevant et en configurant un entrepôt automatisé, un but de conception est de garder le système en tant que léger et compact comme possible. Selon la taille de la charge étant déplacée, il y a deux types communs d'entrepôts automatisés. Dans des applications plus légères, les structures en aluminium peuvent manipuler des charges jusqu'à 100 kilogrammes, alors que les structures métalliques sont bonnes pour des charges plus lourdes de plus de 100 kilogrammes.
La plupart des entrepôts traditionnels utilisent des chariots élévateurs avec la taille limitée, alors que les entrepôts automatisés se servent de l'espace vertical. Le choix des bons composants est principal à veiller un système d'entreposage automatisé optimise la gestion de la logistique. Et les déclencheurs linéaires sont un bon endroit à démarrer.
Employé souvent pour le bras de sélection dans les navettes de entreposage automatisées, les caniveaux inductivement durcis des rails télescopiques fournissent les propriétés courantes optimales. Ils montrent peu de débattement une fois soumis aux charges lourdes, même lorsqu'entièrement prolongés.
Une application de manipulation critique récente dans l'industrie médicale a utilisé les déclencheurs linéaires pour donner à cet entrepôt automatisé un nouveau look.
Ce système de transfert déplace des conteneurs de tube à essai pour des analyses de sang dans un entrepôt réfrigéré. Le robot se déplace le long d'un réseau des haches pour atteindre des étagères placées le long des couloirs d'entrepôt automatisé, adoptant une trajectoire perpendiculaire et changeant la direction par 90 degrés. Plus loin la complication de la situation est la possibilité de surfaces irrégulières où les rails glissent.
Pendant que le robot passe d'une voie à une voie perpendiculaire, ce type de manipulation est contrôlé avec les roulements à billes de recyclage communs qui ont besoin d'alignements précis. En même temps, la configuration d'un système coulissant avec des roues ou d'un ensemble d'incidences sur les rails ne garantit pas la stabilité et la précision nécessaires requises pour placer des objets.
La tâche était de trouver la bonne solution pour ces opérations de manipulation et une configuration fiable pour le système entier.
Puisque le client a eu besoin des mouvements sans heurt et précis le long de l'axe des abscisses, FUYU a recommandé son rail compact pour parvenir les mouvements robotiques du système et les aider pour atteindre et prendre des tubes à essai placés sur des étagères d'entrepôt. Disponible avec différents profils et glisseur qui s'insère dans un profil de rail, ces rails linéaires viennent avec les caniveaux durcis qui absorbent tous les désalignements extérieurs.
FUYU a contrôlé le passage du x à l'axe des y en montant des autres paires de glisseurs sur le chariot pour soutenir et déplacer le robot, aussi bien que deux sections des rails placés perpendiculairement au premier ensemble. Quand le chariot arrête la position latérale, il décroche de l'axe principal, et deux glisseurs supplémentaires entrent dans les rails perpendiculaires et guident le robot le long de l'axe des y. La taille commode du rail compact soutenant des aides pour contrôler le passage des glisseurs des sections de rail sur le chariot, aux voies ferroviaires perpendiculaires avec la facilité relative. Fait à partir d'en acier trempé, ce système se compose des caniveaux durcis et des glisseurs radiaux roulement à billes de haute précision.