Ajouter à mes favoris
Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais
cliquez ici
#Tendances produits
{{{sourceTextContent.title}}}
Présentation succincte des robots CARTESIAN et GANTRY
{{{sourceTextContent.subTitle}}}
Applications recommandées pour différentes tâches.
{{{sourceTextContent.description}}}
Définir
Un robot à coordonnées cartésiennes (également appelé robot linéaire) est un robot industriel dont les trois principaux axes de commande sont linéaires (c'est-à-dire qu'ils se déplacent en ligne droite plutôt qu'en rotation) et sont perpendiculaires l'un à l'autre. Entre autres avantages, cette disposition mécanique simplifie la solution du bras de commande du robot.
Les robots à coordonnées cartésiennes dont l'élément horizontal est supporté aux deux extrémités sont parfois appelés robots portiques. Ils sont souvent assez grands.
Caractéristiques communes
3 axes de liberté linéaires et orientés perpendiculairement.
Point de différence
L'enveloppe de travail d'un robot cartésien est une boîte rectangulaire, similaire à celle d'autres robots de type portique.
Cependant, un robot portique entoure généralement son enveloppe de travail de l'extérieur.
Application recommandée
Grâce à sa structure cartésienne rigide, ce type de robot peut généralement offrir de bons niveaux de précision et de répétabilité.
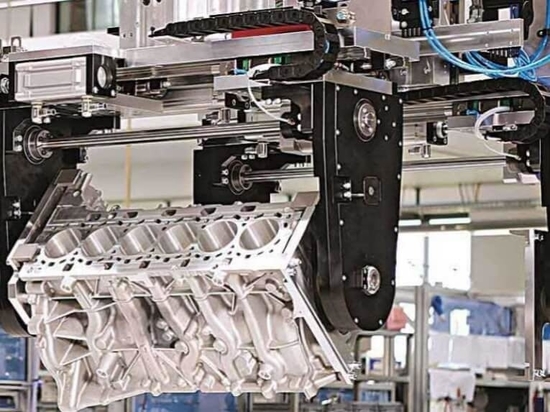
Les machines à commande numérique par ordinateur (CNC) constituent une application courante des robots à portique.
L'application la plus simple est utilisée dans les fraiseuses et les machines à dessiner, où un stylo ou une défonceuse se déplace sur un plan x-y tandis qu'un outil est soulevé et abaissé sur une surface pour créer un dessin précis.