Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Tendances produits
Simplification de la maintenance des machines aériennes grâce à l'automatisation des longs déplacements
Les robots cartésiens constituent un choix approprié pour les applications de dépalettisation.
Les opérations de fabrication et d'emballage utilisant des opérations manuelles de manutention de matériaux ou de pièces peuvent tirer des avantages immédiats de l'automatisation grâce à des robots cartésiens à long rayon d'action dotés d'un outillage personnalisé en bout de bras et de capacités de détection avancées. Ces robots peuvent prendre en charge une grande variété de machines pour effectuer des tâches manuelles telles que la maintenance des machines ou le transfert de pièces en cours de fabrication.
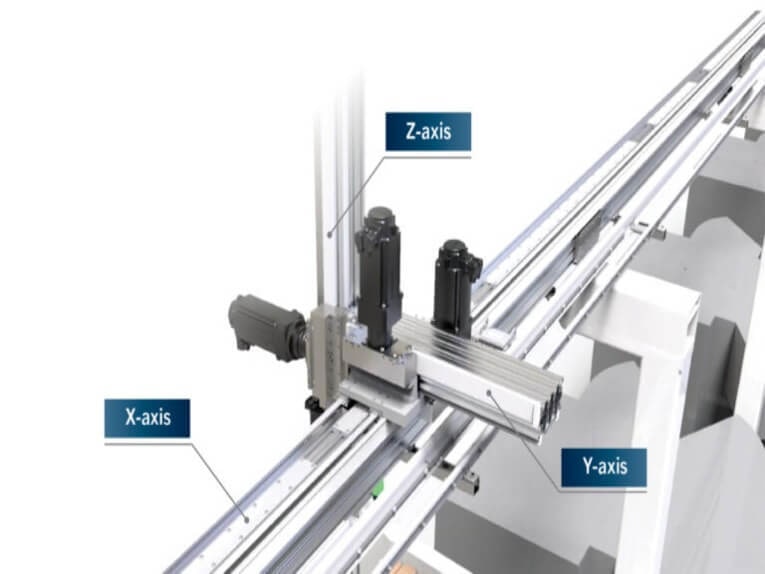
Les robots cartésiens sont constitués d'au moins deux étages de positionnement linéaire coordonnés... et ne sont donc pas forcément la première chose qui vient à l'esprit d'un ingénieur concepteur novice en matière d'automatisation. Beaucoup assimilent les robots à la robotique à bras articulé à six axes que l'industrie utilise de plus en plus dans les ateliers. Même les ingénieurs expérimentés en automatisation peuvent négliger les robots cartésiens et concentrer leur attention sur les modèles à six axes. Pourtant, ignorer les avantages d'un système cartésien à long rayon d'action peut s'avérer une erreur coûteuse, en particulier dans les applications où le robot doit.. :
1. S'occuper de plusieurs machines
2. Atteindre de grandes longueurs
3. Effectuer des opérations simples et répétitives.
Le problème des robots à six axes
Pour de bonnes raisons, les robots à bras articulé occupent une place prépondérante dans une multitude d'installations de fabrication et d'emballage automatisées, en particulier dans les secteurs de l'assemblage électronique et de l'industrie médicale. Lorsqu'ils sont correctement dimensionnés, ces bras robotiques peuvent manipuler de grandes charges utiles avec la flexibilité nécessaire pour effectuer de nombreuses tâches automatisées commandées par la programmation (et complétées par des changements d'outillage en bout de bras). Mais les robots à six axes peuvent être coûteux et nécessitent une densité de robots élevée. Ce dernier terme indique qu'une installation aura probablement besoin d'un robot distinct pour une ou deux machines d'emballage. Bien sûr, il existe des robots à six axes plus grands et plus coûteux, capables de desservir plus de deux machines, mais même ces robots sont des solutions sous-optimales car ils obligent les ingénieurs de l'usine à positionner les machines autour d'un très gros robot. Les robots à bras articulé nécessitent également des protections de sécurité, occupent un espace précieux au sol et doivent être programmés et entretenus par des employés qualifiés.
Le cas des systèmes linéaires cartésiens à long rayon d'action
Les robots cartésiens sont plus performants que les options robotiques à six axes en grande partie parce qu'ils réduisent la densité de robots requise. En effet, un robot de transfert cartésien à grande course peut s'occuper de plusieurs machines sans qu'il soit nécessaire de réorganiser les machines autour du robot.
Les robots de transfert installés au-dessus des machines dont ils s'occupent ne consomment pas d'espace au sol... ce qui réduit également les exigences en matière de sécurité. De plus, les robots cartésiens nécessitent peu de programmation et de maintenance après leur installation initiale.
Une mise en garde s'impose : les capacités des systèmes robotiques cartésiens varient considérablement. En fait, si les ingénieurs font des recherches en ligne sur les robots cartésiens, ils trouveront de nombreux systèmes plus petits optimisés pour les opérations de prise et de dépose sur les machines de production ou d'assemblage. Il s'agit essentiellement d'étapes linéaires intégrées dans des solutions cartésiennes standard, très différentes des robots de transfert utilisés dans les opérations de plus grande envergure et qui doivent satisfaire aux paramètres suivants.
Longs déplacements : Tout robot acheté pour s'occuper de plusieurs grandes machines doit avoir des courses de 50 pieds ou plus.
Chariots multiples et outillage de fin de bras personnalisé : Les robots à long transfert sont extrêmement efficaces lorsqu'ils sont équipés de plusieurs chariots à action indépendante pour déplacer l'axe principal... ce qui permet à un robot cartésien donné de faire le travail de plusieurs. Cette productivité est renforcée par un outillage spécialement conçu pour manipuler les marchandises de manière plus efficace que l'EoAT standard, comme les pinces à vide ou les pinces à doigts. Dans de nombreux cas, l'EoAT sur mesure peut également simplifier la conception des systèmes de manutention fonctionnant en conjonction avec le robot cartésien.
Architecture de contrôle simplifiée : Certains robots cartésiens récents abandonnent les architectures de contrôle traditionnelles basées sur des moteurs, des entraînements et des contrôleurs séparés pour des servomoteurs intégrés (avec servomoteurs) afin de supprimer le besoin d'une armoire de contrôle. Les applications de robots cartésiens les plus complexes peuvent encore nécessiter une architecture traditionnelle ... mais les servomoteurs intégrés gèrent habilement les exigences de contrôle de mouvement point à point de la plupart des robots cartésiens. Lorsqu'un ingénieur concepteur peut utiliser des servomoteurs intégrés, il peut contribuer à maximiser l'avantage financier d'une automatisation basée sur des robots cartésiens.
Utilisation sélective : Comme les robots cartésiens se montent au-dessus ou derrière les machines qu'ils manipulent, ils permettent également aux utilisateurs de faire fonctionner les machines manuellement lorsque cela est nécessaire - par exemple, pour une courte série d'une taille spéciale. Cette utilisation sélective est difficile avec les robots à six axes montés au sol, qui peuvent bloquer l'accès aux machines.
Exemple spécifique de robot cartésien
Certains robots cartésiens offrent des courses supérieures à 50 pieds tout en atteignant des vitesses de 4 m/sec. Les chariots standard peuvent être équipés d'une technologie d'entraînement à double courroie ; d'autres chariots contiennent une courroie d'entraînement supérieure qui s'enroule continuellement à l'intérieur. Cette dernière évite l'affaissement de la courroie dans les configurations inversées ou en porte-à-faux et permet à plusieurs chariots indépendants de fonctionner simultanément sur un axe.
Les courroies longues compliquent la conception des robots cartésiens, car elles réduisent la rigidité de la chaîne cinématique (qui à son tour réduit les performances). En effet, il est difficile de maintenir une valeur de tension donnée sur de longues courroies... et (pour aggraver les choses) la tension de la courroie est asymétrique et variable. Ce problème fait des longues courroies à recirculation un choix peu performant, délicat et coûteux pour un positionnement précis.
En revanche, les platines linéaires à moteur mobile maintiennent des longueurs de courroie courtes et serrées et sont logées dans le chariot de manière à pouvoir répondre aux commandes informées par encodeur. La précision est maintenue quelle que soit la longueur du système de transfert cartésien, qu'elle soit de 4 m ou de 40 m.
Exemple d'application dans l'industrie de l'emballage
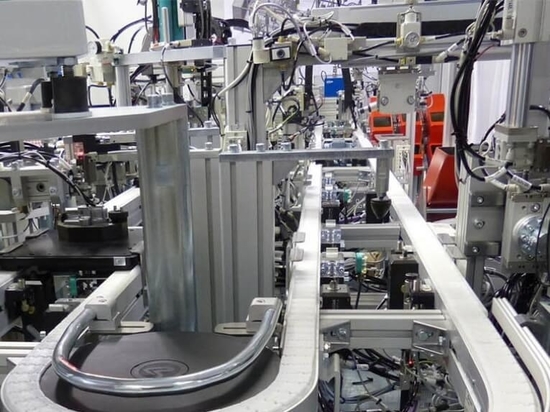
Les unités de transfert robotisé cartésien à grande course sont utilisées dans les applications d'alimentation, d'étuyage et de formation de plateaux et peuvent prendre en charge les opérations de palettisation et de dépalettisation.
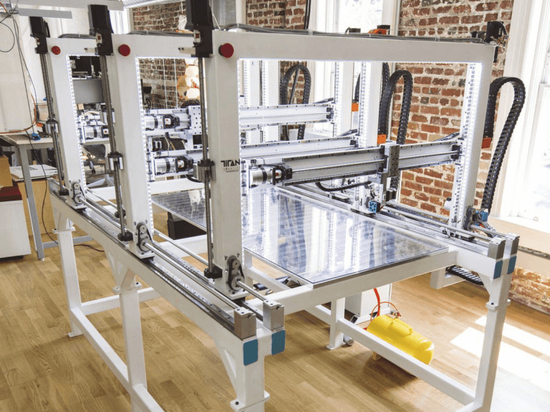
Prenons l'exemple de l'emballage de produits. Dans le cadre d'une application récente pour une entreprise d'emballage agricole de la Central Valley en Californie, un fabricant a fourni des robots de transfert à long rayon d'action pour s'intégrer de manière transparente au système de formation de plateaux IPAK existant. Chaque robot s'occupe de quatre machines à la fois, qu'il remplit de feuilles de carton ondulé empilées. Les robots portiques à trois axes sont basés sur des étages de servomoteurs linéaires robustes entraînés par courroie pour des longueurs de déplacement illimitées, des chariots à déplacement indépendant et la possibilité de monter l'étage dans n'importe quelle orientation. L'axe le plus long de l'un de ces robots passe au-dessus de la banque de formeuses de plateaux avec une course de plus de 15 mètres.
Pour livrer des feuilles de carton ondulé aux quatre machines à former les plateaux, un robot prélève d'abord une charge de carton sur un quai construit sur mesure et contenant des palettes de feuilles de carton ondulé. Le robot livre ensuite une charge de carton à chaque formeuse de barquettes. Grâce à sa vitesse (jusqu'à 4 m/sec), le robot peut facilement cadencer quatre formeuses de plateaux, même à une cadence de 35 plateaux par minute.
Le dispositif de sécurité utilise des barrières coulissantes aériennes et des capteurs qui s'élèvent des machines tendues pour clôturer le robot selon les besoins, ce qui constitue une solution moins coûteuse que les robots à six axes montés au sol.
Ce système comprend également toutes les commandes et l'EoAT personnalisé capable de travailler avec des piles de plaques de carton ondulé dont la hauteur et le poids varient de manière imprévisible. L'outillage peut manipuler des charges utiles de 50 kg sans problème. La solution soulage les opérateurs qui devaient auparavant soulever les paquets de carton des palettes et se pencher pour les introduire dans les machines de formage. L'automatisation de ces tâches a permis au personnel de se consacrer à des tâches moins pénibles.Les grands robots de transfert ne sont qu'un exemple des possibilités offertes par les systèmes robotiques cartésiens dans le domaine de l'emballage. Certains fournisseurs ont également développé des systèmes de palettisation et de dépalettisation basés sur des approches cartésiennes similaires. Tous ces robots utilisent trois étages linéaires équipés de capteurs, de commandes et d'outils en bout de bras pour une automatisation maximale et efficace de l'emballage.