Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Tendances produits
Qu'est-ce qu'un robot portique ?
Types et applications des systèmes de mouvement linéaire à plusieurs axes.
Types de portiques robotisés
Les portiques robotisés se présentent sous différentes formes et tailles, et chaque type est conçu pour effectuer des tâches spécifiques. Voici les principaux types de portiques robotisés :
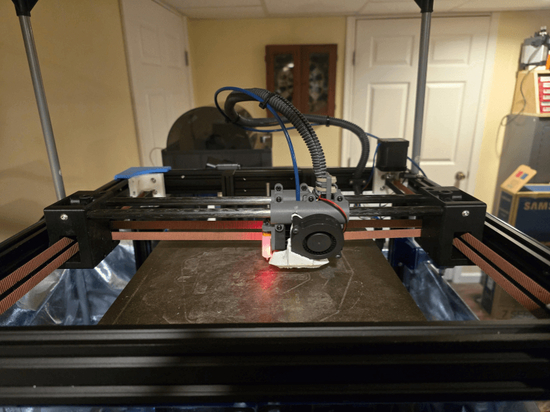
Portique cartésien
Les portiques cartésiens, également connus sous le nom de portiques robotiques linéaires, sont le type de portique robotique le plus couramment utilisé. Ils se composent de deux axes linéaires ou plus qui se déplacent en ligne droite le long des axes X, Y et Z. Le bras du robot est monté sur un chariot. Le bras du robot est monté sur un chariot qui se déplace le long de la structure du portique, ce qui lui permet d'atteindre différents points à l'intérieur de l'enveloppe de travail.
Les portiques cartésiens sont connus pour leur grande précision et leur répétabilité, ce qui les rend idéaux pour les applications nécessitant un positionnement précis. Ils sont souvent utilisés pour l'usinage à commande numérique par ordinateur (CNC), l'impression 3D et les opérations de prélèvement et de placement.
Portique articulé
Les portiques articulés sont constitués de plusieurs segments reliés par des articulations ou des liens. Chaque articulation peut tourner autour de son axe, ce qui confère au robot un degré de liberté et de flexibilité supérieur à celui d'un portique cartésien. Les portiques articulés sont couramment utilisés dans des applications qui requièrent un haut niveau de dextérité, telles que les applications de prise et de dépose, le soudage et la peinture.
Les portiques articulés peuvent atteindre n'importe quel point de leur espace de travail en pliant leurs articulations, et ils sont souvent utilisés dans des applications nécessitant des mouvements complexes. Ils sont également utilisés dans les robots collaboratifs ou cobots qui peuvent travailler en toute sécurité aux côtés d'opérateurs humains.
Portique parallèle
Les portiques parallèles, également appelés manipulateurs parallèles ou robots delta, sont constitués d'une série de liens parallèles reliés à une base fixe et à une plateforme mobile. Le bras du robot est monté sur la plate-forme mobile et les liens sont actionnés par une série d'actionneurs qui contrôlent le mouvement de la plate-forme. Les portiques parallèles sont connus pour leur capacité de charge et leur rigidité élevées, ce qui les rend adaptés aux applications lourdes telles que la manutention et l'assemblage. Ils sont souvent utilisés dans l'industrie alimentaire et des boissons pour les opérations d'emballage et de palettisation, où la vitesse et la précision sont essentielles.
Portique hybride
Les portiques hybrides combinent les caractéristiques de deux ou plusieurs configurations de systèmes de portique afin de créer une solution personnalisée pour des applications spécifiques. Par exemple, un portique hybride peut combiner la haute précision d'un portique cartésien avec la flexibilité d'un portique articulé, ou la capacité de charge élevée d'un portique parallèle avec la précision d'un portique cartésien.
Les portiques hybrides sont souvent utilisés dans des applications qui requièrent une combinaison unique de caractéristiques qui ne peuvent être obtenues avec un seul type de portique.
Chaque type de portique robotisé présente des caractéristiques et des avantages uniques, en fonction des exigences de l'application. Les portiques cartésiens sont connus pour leur grande précision et leur répétabilité, tandis que les portiques articulés sont plus flexibles et peuvent travailler dans des espaces restreints. Les portiques parallèles ont une capacité de charge et une rigidité élevées, tandis que les portiques hybrides offrent une solution personnalisée pour des applications spécifiques.
Lors de la sélection d'un portique robotisé, il est essentiel de prendre en compte les exigences spécifiques de l'application afin de déterminer le type de portique le mieux adapté à la tâche. Des facteurs tels que la taille et le poids des pièces, la vitesse et la précision de l'opération, ainsi que les limites de l'espace de travail doivent être pris en compte.
Applications des portiques robotisés
Les portiques robotisés sont largement utilisés dans divers secteurs, notamment la fabrication, l'automobile, l'aérospatiale et la logistique, où des mouvements précis et répétitifs sont nécessaires. Voici quelques applications typiques des portiques robotisés :
Manutention de matériaux
Les portiques robotisés sont largement utilisés dans les applications de manutention, où ils peuvent déplacer des matériaux lourds et encombrants avec une grande précision et une grande rapidité. Les applications de manutention comprennent la palettisation, la dépalettisation, ainsi que le chargement et le déchargement de produits.
Dans une application de palettisation, le portique robotisé peut prendre des boîtes ou des produits sur un convoyeur et les placer sur une palette selon un schéma spécifique. Dans une application de dépalettisation, le portique robotisé peut prendre et placer des produits d'une palette sur un convoyeur.
Soudage
Les portiques robotisés sont largement utilisés dans les applications de soudage, où ils peuvent effectuer des tâches de soudage répétitives avec une précision et une exactitude élevées. Les applications de soudage comprennent le soudage par points, le soudage à l'arc et le soudage au laser.
Dans une application de soudage par points, le portique robotisé peut saisir un pistolet de soudage et effectuer des soudures par points sur une pièce selon un schéma spécifique. Dans une application de soudage à l'arc, le portique robotisé peut saisir une torche de soudage et effectuer des soudures sur une pièce tout en se déplaçant le long d'une trajectoire spécifique. Dans une application de soudage au laser, le portique robotisé peut saisir un laser et effectuer des soudures sur une pièce avec une grande précision.
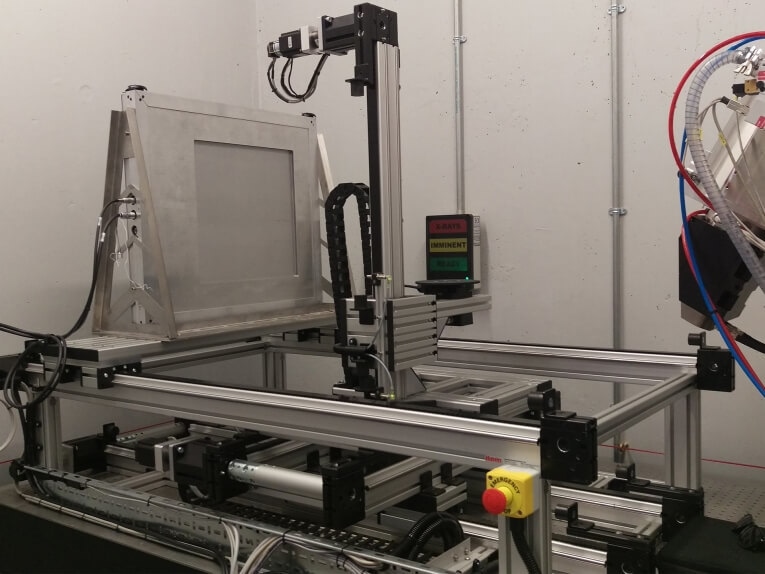
Peinture
Les portiques robotisés sont largement utilisés dans les applications de peinture, où ils peuvent peindre des formes et des surfaces complexes. Les applications de peinture comprennent la peinture automobile, la peinture aéronautique et la peinture industrielle.
Dans une application de peinture automobile, le portique robotisé peut saisir un pistolet et appliquer de la peinture sur la carrosserie d'une voiture tout en se déplaçant le long d'une trajectoire spécifique. Dans une application de peinture aéronautique, le portique robotisé peut saisir un pistolet de pulvérisation et appliquer de la peinture sur une carrosserie d'avion. Le portique robotisé peut saisir un pistolet de pulvérisation et appliquer de la peinture sur de grandes pièces ou structures dans le cadre d'une application de peinture industrielle.
Inspection et essais
Les portiques robotisés sont largement utilisés dans les applications d'inspection et de test, où ils peuvent effectuer des mesures et des tests précis et répétitifs. Les applications d'inspection et d'essai comprennent le contrôle de la qualité, les essais non destructifs et la métrologie.
Dans une application de contrôle de la qualité, le portique robotisé peut saisir un capteur et effectuer des mesures sur une pièce pour s'assurer qu'elle répond aux spécifications requises. Dans une application de contrôle non destructif, le portique robotisé peut saisir un capteur et effectuer des tests sur une pièce afin de détecter d'éventuels défauts ou imperfections. Dans une application de métrologie, le portique robotisé peut saisir un capteur et effectuer des mesures précises sur une pièce afin de déterminer ses dimensions et ses tolérances.