Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Tendances produits
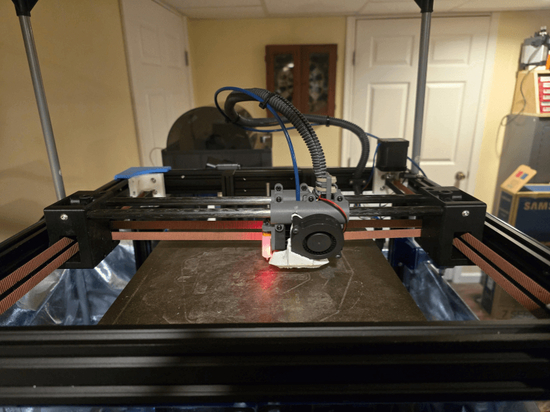
Qu'est-ce qu'un portique robotisé ?
Composants du système de positionnement XYZ.
Les portiques robotisés sont des outils puissants dans la fabrication et l'automatisation modernes, offrant une précision, une flexibilité et une efficacité accrues dans toute une série d'applications.
Introduction
Un portique robotisé est un robot industriel doté d'un bras robotisé monté sur un système de rails aériens ou sur un châssis. La structure du portique comprend une série de poutres ou d'entretoises qui confèrent au robot la stabilité et la précision nécessaires pour se déplacer selon les axes X, Y et Z. Les portiques pour robots sont couramment utilisés dans des applications où de lourdes charges utiles doivent être soulevées et déplacées sur de vastes zones de travail. Les robots peuvent être configurés pour fonctionner dans divers environnements, y compris les salles blanches, les environnements dangereux et d'autres applications spécialisées.
Composants du portique robotisé
Les systèmes robotiques à portique sont constitués de plusieurs composants qui fonctionnent ensemble pour réaliser des mouvements précis et exacts. Voici les principaux composants d'un portique robotisé :
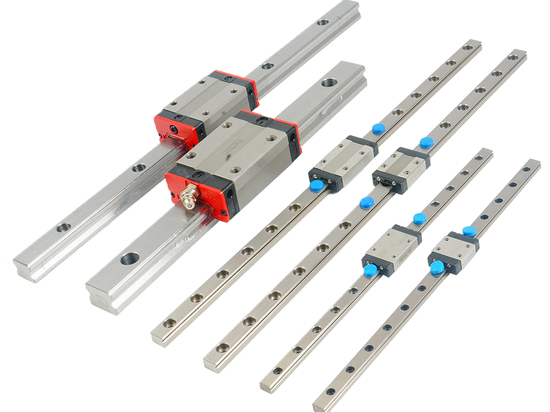
Structure du portique
La structure du portique est le cadre qui supporte le bras du robot et le module effecteur. Elle se compose de deux ou plusieurs poutres parallèles qui se déplacent le long des axes X et Y et d'une colonne verticale qui se déplace le long de l'axe Z. La structure doit être rigide et stable pour garantir la précision et la répétabilité des mouvements du robot.
La structure du portique peut être fabriquée à partir de différents matériaux, notamment l'aluminium, l'acier et la fibre de carbone, en fonction des exigences de l'application. Le matériau utilisé doit être suffisamment solide pour supporter le poids du bras du robot et de l'effecteur final, tout en étant léger pour réduire le poids total du portique.
Bras du robot
Le bras du robot est une partie du portique qui tient l'effecteur et se déplace le long des axes X, Y et Z. Le bras du robot doit être suffisamment résistant pour supporter le poids de l'effecteur et du bras du robot. La conception et les spécifications du bras du robot dépendent des exigences de l'application, telles que la portée, la capacité de charge et la vitesse.
Le bras robotisé peut être équipé de différents types d'effecteurs, tels que des pinces, des ventouses et des pistolets de soudage, pour effectuer des tâches spécifiques.
Effet terminal
L'effecteur est l'outil ou le dispositif qui est fixé au bras robotisé pour effectuer une tâche spécifique. Il peut s'agir d'une pince, d'une ventouse, d'un pistolet de soudage, d'un outil de coupe ou de tout autre dispositif permettant de manipuler la pièce ou le matériau à traiter.
L'effecteur doit être conçu pour répondre aux exigences de l'application, telles que la forme et la taille de la pièce, le poids et le matériau à traiter. La conception de l'effecteur peut également avoir une incidence sur la précision et la répétabilité globales des mouvements du robot.
Système d'entraînement
Le système d'entraînement se compose de moteurs et d'actionneurs qui contrôlent le mouvement de la structure du portique et du bras du robot. Selon les exigences de l'application, le système d'entraînement peut être hydraulique, pneumatique ou électrique.
Les spécifications du système d'entraînement dépendent des exigences de l'application, telles que la vitesse, le couple et la précision. Le système d'entraînement doit également être conçu pour fonctionner avec le système de contrôle afin d'obtenir des mouvements précis et exacts.
Système de commande
Le système de commande est le cerveau du portique robotisé, responsable du contrôle des mouvements de la structure du portique et du bras du robot.
Le logiciel du système de commande doit être programmé pour répondre aux exigences de l'application, telles que le profil de mouvement, les taux d'accélération et de décélération et la planification de la trajectoire. Le système de commande doit également s'intégrer à d'autres capteurs et équipements afin d'obtenir des mouvements précis et exacts.
Dans l'ensemble, la conception et les spécifications de chaque composant d'un portique robotisé doivent être soigneusement étudiées pour obtenir des mouvements exacts et précis, garantissant ainsi la fiabilité et l'efficacité du portique dans l'accomplissement de sa tâche.