Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Actualités du secteur
{{{sourceTextContent.title}}}
Pourquoi utiliser un moteur linéaire plutôt qu'une vis à billes ou un actionneur linéaire ?
{{{sourceTextContent.subTitle}}}
Applications des moteurs linéaires par rapport aux actionneurs linéaires.
{{{sourceTextContent.description}}}
Lorsque l'on parle de "moteur", l'image qui vient à l'esprit de la plupart des gens est celle d'un objet qui tourne. Cependant, les moteurs peuvent prendre différentes formes, comme les moteurs linéaires.
Le moteur linéaire a été inventé à la fin des années 1940 par le Dr Eric Laithwaite de l'université de Manchester. Au départ, il s'agissait de dispositifs à faible accélération, mais aujourd'hui, la technologie permet d'atteindre des vitesses extrêmement élevées dans le domaine de l'automatisation. Cette technologie est également à l'origine du transport mag-lev.
La construction
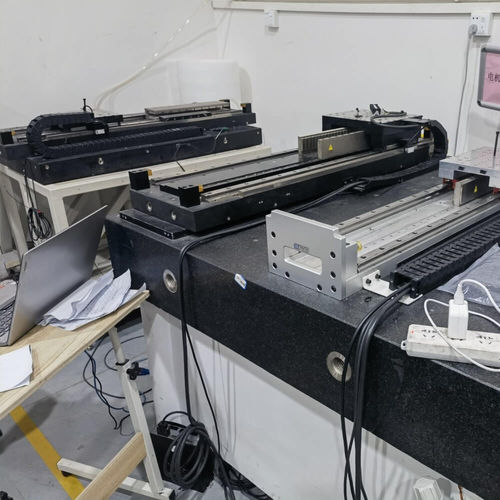
Contrairement aux moteurs rotatifs, les moteurs linéaires ne comportent pas de rotor tournant dans un stator, mais un chariot qui se déplace d'avant en arrière le long d'un rail.
La construction d'un moteur linéaire est la même que celle d'un moteur triphasé rotatif, mais elle est ouverte et aplatie. La configuration d'un servomoteur pour un moteur linéaire est identique à celle d'un servomoteur pour un moteur rotatif.
Un moteur linéaire est constitué d'aimants permanents dont la polarité est alternée et d'un chariot mobile comportant trois phases de bobines. La direction du courant à travers ces bobines magnétise les phases nord ou sud, ce qui les tire ou les pousse respectivement le long de la piste du moteur.
Applications comparées aux actionneurs linéaires
Les moteurs linéaires ne sont pas le seul moyen de contrôler les mouvements linéaires. Dans de nombreux cas, le même mouvement peut être obtenu à l'aide d'un moteur rotatif et d'une vis à billes ou d'un actionneur linéaire. Les vis à billes et les actionneurs linéaires sont généralement beaucoup moins chers que les moteurs linéaires :
Pourquoi utiliser un moteur linéaire plutôt qu'une vis à billes ou un actionneur linéaire ?
Réponse courte : Les moteurs linéaires sont destinés aux mouvements rapides, à l'accélération et à une très grande précision. Les vis à billes et les actionneurs linéaires sont destinés à une force élevée et à un coût moindre.
Réponse longue : Comme nous l'avons vu, un moteur linéaire est construit de la même manière qu'un moteur rotatif sans balais, mais aplati. Lorsqu'il est utilisé dans une application, la charge est fixée au chariot qui se déplace le long des aimants permanents. Comme il n'y a pas d'engrenage, il s'agit d'un système d'entraînement direct, ce qui lui confère une réactivité et une vitesse incroyables, sans aucun jeu. L'inconvénient est que la force est limitée par l'intensité des forces magnétiques et la puissance que peuvent supporter les bobines du moteur.
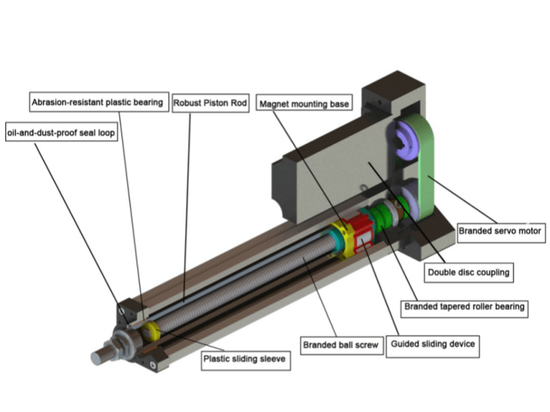
D'autre part, les vis à billes et les actionneurs linéaires utilisent des moteurs rotatifs reliés à un système d'engrenage mécanique qui traduit le mouvement rotatif en mouvement linéaire. Du fait de la présence d'un engrenage, la force disponible est beaucoup plus élevée que celle d'un moteur linéaire. Plus l'avance de la vis à billes est courte, plus la force peut être générée, mais il y a un sacrifice en termes de vitesse. Il faut également tenir compte du jeu dans beaucoup de ces types de systèmes, ce qui réduit la précision.
Les moteurs linéaires sont utilisés dans les applications d'entraînement direct où les exigences de vitesse et de précision sont supérieures à ce qu'un moteur rotatif et un actionneur mécanique peuvent fournir, comme dans le cas d'une imprimante 3D industrielle, une vitesse et une accélération probablement impossibles à obtenir avec une vis à billes ou un actionneur linéaire.