Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Tendances produits
{{{sourceTextContent.title}}}
Les 7 premiers robots industriels à connaître
{{{sourceTextContent.subTitle}}}
Solutions d'automatisation pour l'avenir.
{{{sourceTextContent.description}}}
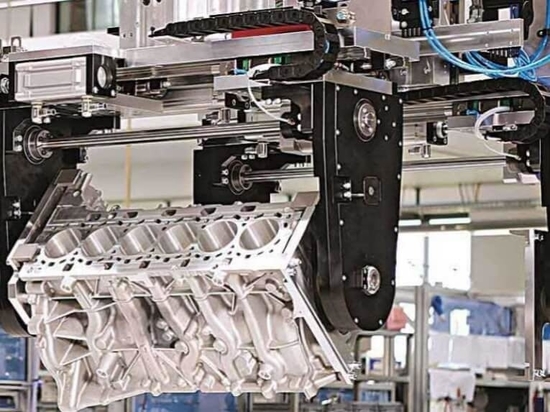
Les robots industriels sont des machines automatisées qui sont utilisées dans les industries manufacturières à la place des êtres humains. Ils sont plus rapides, plus précis et peuvent fonctionner pendant des jours, des qualités qui expliquent leur ascension progressive dans le monde de la fabrication. Les robots industriels peuvent être classés en 7 catégories principales, présentées ci-dessous.
Robots articulés
Les robots articulés sont les plus couramment utilisés dans l'industrie manufacturière et se caractérisent par des articulations rotatives appelées axes. Ils vont de simples articulations à 2 axes à des articulations sophistiquées à plus de 10 axes, actionnées par des moteurs. Le robot articulé le plus courant dans une usine est un robot à 6 axes.
Grâce à leurs axes, les robots articulés sont les plus flexibles et sont donc utilisés dans des rôles qui nécessitent un travail multitâche intense. Vous les trouverez dans les tâches de soudage, de transfert de pièces, d'assemblage, de prélèvement et de mise en place, d'emballage et de palettisation.
Robots cylindriques
Il s'agit de robots dotés d'une seule articulation rotative à la base et d'une autre articulation prismatique qui relie les maillons. Cette articulation rotative utilise un mouvement de rotation le long de l'axe de l'articulation, tandis que l'articulation prismatique utilise un mouvement linéaire. Ce qui leur donne le nom de cylindriques, c'est la forme de leur enveloppe, qui a la forme d'un cylindre. Parmi les règles qui conviennent le mieux aux robots cylindriques, citons l'enrobage robotisé et l'entretien des machines.
Robots cartésiens
Comme leur nom l'indique, les robots cartésiens fonctionnent le long d'un système de rails linéaires. Également connus sous le nom de robots portiques, ils ont une enveloppe en forme de cube qui comporte trois axes perpendiculaires X, Y et Z. Ce sont ces axes qui déterminent chaque mouvement directionnel du robot au cours des opérations. Les robots cartésiens sont les mieux adaptés aux fonctions de prélèvement et de placement, car ils peuvent couvrir de très grandes distances, en fonction de la longueur de l'amarre linéaire. La plupart des lignes sont généralement aériennes, ce qui fait de ces types de robots les meilleurs pour l'utilisation de l'espace.
Robots SCARA
Les robots SCARA font partie des robots industriels les plus avancés. Ils sont surtout connus pour leur vitesse, ce qui explique qu'on leur confie des tâches sophistiquées telles que l'assemblage de pièces complexes de voitures et d'autres engins automobiles. Ils ont une enveloppe cylindrique et peuvent également fonctionner sur un plan X, Y, Z couplé à un mouvement rotatif. Le chargement de machines, la palettisation et l'emballage automatisé sont d'autres fonctions que les robots SCARA peuvent parfaitement prendre en charge.
Robots collaboratifs
Les robots collaboratifs ont été la réponse à la nécessité d'associer la main-d'œuvre humaine aux robots. Ils sont conçus avec les meilleures caractéristiques de sécurité, ce qui les rend idéaux pour travailler aux côtés des humains sans risque d'accident. Ils sont arrondis sans aucune pointe et sont équipés de capteurs de pointe capables de déterminer les distances lorsque des êtres humains se trouvent à proximité.
Robots Delta
Également appelés robots parallèles, ce sont des machines industrielles automatisées dotées de bras à articulation parallèle qui s'étendent à partir d'une base commune orientée vers le bas. Leur enveloppe est en forme de dôme. Leurs bras extrêmement légers en font le robot idéal pour les tâches qui nécessitent des graines élevées avec une précision égale. C'est le type de robots que l'on trouve dans les usines de fabrication électronique, les usines de transformation alimentaire ou les usines pharmaceutiques. Leur rôle consiste notamment à prélever et à placer des pièces et à les transférer.
Robots polaires
Les robots polaires ont été les premiers robots industriels à être inventés ; la plupart des robots améliorés qui sont apparus par la suite étaient grossièrement basés sur les plans des robots polaires. Ils ont une enveloppe de travail sphérique et une formation en coordonnées polaires de l'axe du robot. Ils ne sont plus très utilisés, mais dans les endroits où ils ont été adaptés à des rôles modernes, vous les trouverez en train de s'occuper de tâches telles que le moulage sous pression, le moulage par injection et la manutention de matériaux.
Conclusion
Les robots industriels continuent de révolutionner le processus de fabrication dans le monde entier. Ils sont plus rapides et produisent des matériaux de haute qualité. Toutefois, on ne peut ignorer les perturbations qu'ils continuent de provoquer sur le marché du travail.
Alors que de plus en plus de fabricants passent de la main-d'œuvre humaine aux machines automatisées, ce n'est qu'une question de temps avant que les cuisses ne deviennent poilues. Si l'industrie manufacturière vous intéresse depuis un certain temps, le fait d'apprendre à connaître tous ces types de robots et leur fonctionnement constituera un bon point de départ pour votre parcours.