#Tendances produits
Types de robots basés sur la configuration
Robot cartésien, robot SCARA, robot articulé, robot parallèle.
Introduction aux robots industriels
Un robot industriel peut être défini comme un système de robot utilisé pour la fabrication. Un large éventail de tâches peut être effectué par les robots de fabrication industrielle car ils sont inclus avec diverses capacités.
Les robots industriels effectuent diverses tâches (telles que les activités de prise et de bridage, le soudage par points et à l'arc, le bridage pour l'usinage, la manipulation et le transfert de pièces) à l'aide de capteurs, de logiciels informatiques et d'un réseau de gestes mécaniques complexes.
De plus, les robots industriels sont automatisés, programmables et capables de se déplacer sur deux axes ou plus. Les applications des robots comprennent le soudage, la peinture, l'assemblage, le prélèvement et le placement de cartes de circuits imprimés, l'emballage et l'étiquetage, la palettisation, l'inspection et les tests de produits ; le tout accompli avec une endurance, une vitesse et une précision élevées.
Un guide rapide des définitions
Axe - L'axe peut être défini comme une direction utilisée pour indiquer le mouvement d'un robot en mode linéaire ou rotatif
Vitesse – Dans ce cas, la vitesse peut être définie comme la vitesse d'un robot utilisé pour positionner l'extrémité de son bras lorsque tous les axes se déplacent.
Accélération - À quelle vitesse un bras robotique peut-il accélérer le rythme
Précision - La précision peut être définie comme l'exactitude d'un robot sur la distance à laquelle il peut atteindre une position commandée.
Répétabilité - Dans quelle mesure le robot reviendra-t-il à une position programmée.
Capacité de charge ou charge utile - combien de poids un robot peut soulever
Joint prismatique : il fournit un mouvement de glissement linéaire entre deux corps (il est souvent appelé curseur). Il peut être formé avec une section transversale polygonale pour résister à la rotation.
Cinématique - La disposition réelle des éléments rigides et des articulations dans le robot, qui détermine les mouvements possibles du robot. Les classes de cinématique de robot comprennent les cinématiques articulées, cartésiennes, parallèles et SCARA.
Types de robots industriels
Il existe différents types de robots industriels en fonction des spécifications et des applications. Différents types de robots industriels comprennent des robots non servo, des servo robots, des robots programmables et des robots programmables par ordinateur.
Robots non servo : Ces robots sont utilisés pour déplacer et placer des objets. Cela signifie que ces robots seront capables de ramasser un objet et de transporter l'objet, de le déposer.
Robots servo : Les robots servo comprennent des manipulateurs, des effecteurs, des appendices robotiques qui fonctionnent comme les bras et les mains du robot.
Robots programmables : ces robots stockent des commandes dans une base de données, c'est-à-dire qu'ils peuvent répéter une tâche un nombre de fois prédéterminé.
Robots programmables par ordinateur : Ces robots sont essentiellement des servo-robots qui peuvent être contrôlés à distance, via un ordinateur.
Classification par types de robots
Les robots sont principalement classés en cinq configurations principales en fonction de leur structure mécanique. Ils sont:
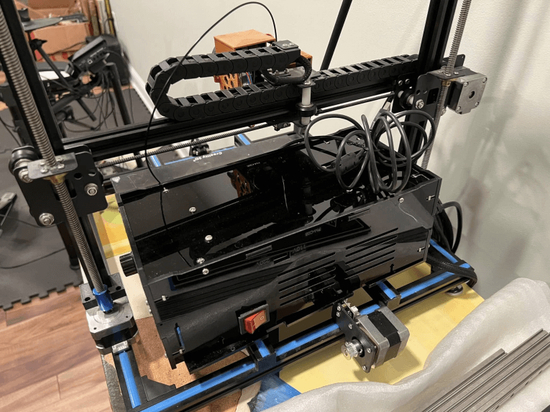
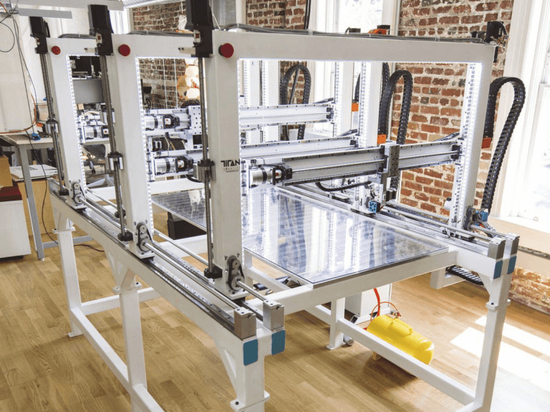
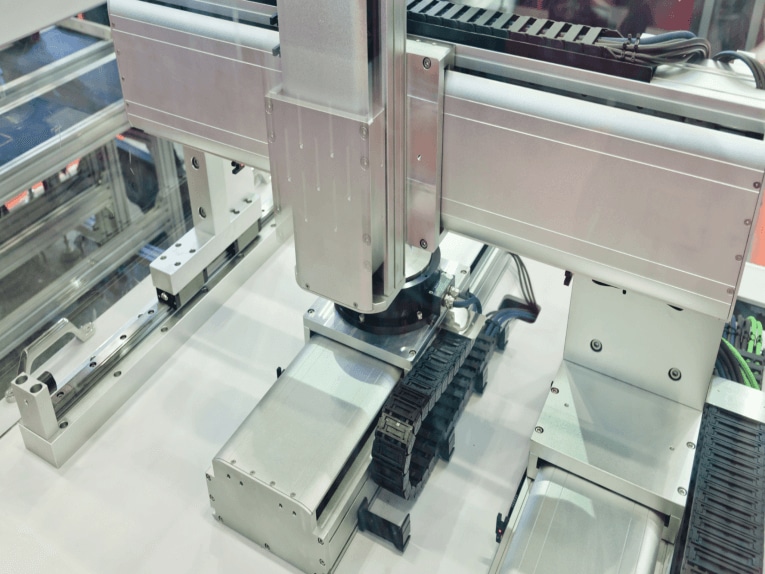
Robot cartésien : le robot cartésien se compose de trois articulations prismatiques et les axes sont simultanés avec un système de coordonnées cartésien
Robot SCARA : Le robot SCARA (Selective Compliance Assembly Robot Arm) est inclus avec deux joints rotatifs parallèles pour assurer la conformité dans un plan.
Robot articulé : Un robot articulé est un robot dont le bras possède au moins trois articulations rotatives
Robot parallèle : Un robot parallèle est un robot dont les bras ont des articulations prismatiques ou rotatives concurrentes