#Tendances produits
Qu'est-ce qu'un robot à coordonnées cartésiennes ?
Définition, conception et configurations pour le système de positionnement linéaire.
Définition du robot cartésien
Un robot cartésien ou un robot à coordonnées cartésiennes (également connu sous le nom de robot linéaire) est un robot industriel avec trois axes de contrôle principaux qui sont tous linéaires (ce qui signifie qu'ils se déplacent le long d'une ligne droite plutôt que de tourner) et mutuellement perpendiculaires les uns aux autres. Les 3 articulations coulissantes vous permettent de déplacer votre poignet de haut en bas, d'avant en arrière et d'avant en arrière. Dans l'espace 3D, il est incroyablement fiable et précis. Il est également utile pour le mouvement horizontal et l'empilage des bacs en tant que système de coordonnées du robot.
Conception et configurations de robots cartésiens
Pour comprendre le mécanisme de conception d'un robot cartésien, l'une des premières choses à comprendre est le concept de topologie conjointe. Une cible mobile est liée à une base de manipulateurs en série par une chaîne continue de maillons et d'articulations. La cible mobile est reliée au bas des manipulateurs parallèles par plusieurs chaînes (membres). La majorité des robots à coordonnées cartésiennes utilisent un mélange de liaisons en série et en parallèle. Tous les robots à coordonnées cartésiennes, en revanche, sont totalement connectés en parallèle.
Vient ensuite le degré de liberté. Les robots à coordonnées cartésiennes manipulent généralement des structures avec uniquement des degrés de liberté de translation linéaire T, car des articulations P prismatiques à travail linéaire les font fonctionner. D'autre part, peu de robots à coordonnées cartésiennes ont également des degrés de liberté de rotation R.
La disposition des axes est l'une des premières choses à déterminer lors de la construction d'un robot cartésien, non seulement pour accomplir les mouvements nécessaires, mais aussi pour s'assurer que l'appareil a une rigidité adéquate, ce qui peut affecter la capacité de charge, la précision de déplacement et la précision de positionnement. .
Certaines applications nécessitant un mouvement de coordonnées cartésiennes sont mieux assistées par un robot portique que par une méthode cartésienne, principalement si l'axe Y implique une longue course ou si la procédure cartésienne placera des moments substantiels sur les axes. Un dispositif portique avec des axes Dual-X ou Dual-Y peut être nécessaire pour éviter une déviation ou des vibrations inutiles dans ces situations.
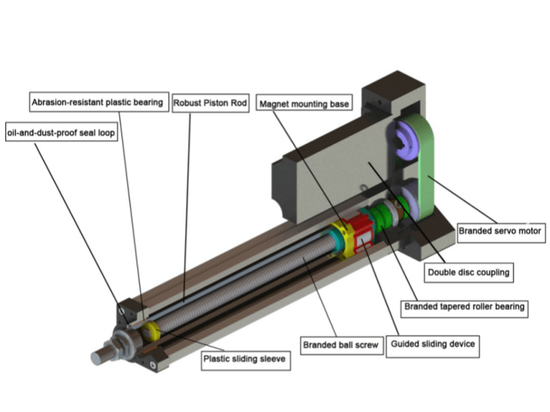
Un niveau linéaire, composé d'un actionneur linéaire géométriquement parallèle à des roulements linéaires, est généralement utilisé pour chaque axe d'un robot à coordonnées cartésiennes et l'actionneur linéaire est généralement monté entre 2 roulements linéaires qui sont mis à part pour supporter la charge de moment. Une table XY est composée de deux étages linéaires perpendiculaires empilés l'un sur l'autre.