Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Actualités du secteur
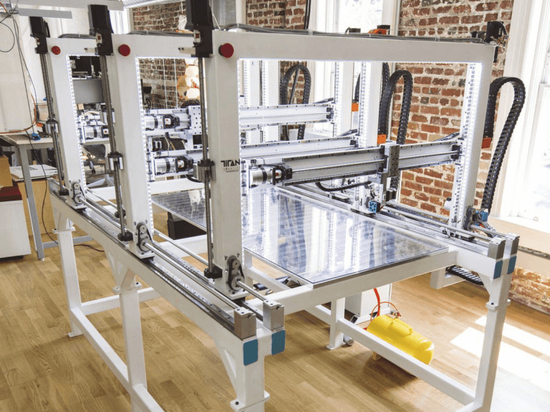
Robot industriel cartésien à portique Pick and Place
Commande d'un robot à portique linéaire et enveloppe de travail.
Les applications de type "pick-and-place", telles que l'utilisation en laboratoire, bénéficient de la construction en porte-à-faux car les composants sont facilement accessibles. Les robots portiques sont des robots à coordonnées cartésiennes dont les membres horizontaux sont soutenus aux deux extrémités ; physiquement, ils sont similaires aux grues portiques, qui ne sont pas nécessairement des robots. Les robots portiques sont souvent gigantesques et capables de porter de lourdes charges.
Différence entre les robots portiques et les robots cartésiens
Un robot cartésien possède un actionneur linéaire sur chaque axe, tandis qu'un robot portique possède deux axes de base (X) et un second axe (Y) qui les enjambe. Cette conception empêche le 2e axe d'être en porte-à-faux (nous y reviendrons plus tard) et permet des courses encore plus longues dans les portiques et une charge utile plus importante par rapport aux robots cartésiens.
Les robots cartésiens les plus courants utilisent la conception à double guidage parce qu'elle offre une meilleure protection contre les charges en porte-à-faux (moment) ; cependant, les axes à double guidage linéaire ont une empreinte plus importante que les axes à simple guidage, en comparaison les systèmes à double guidage sont généralement courts (dans la direction verticale) et peuvent éliminer l'interaction avec d'autres zones de la machine. L'argument est que le type d'axes que vous choisissez a un impact non seulement sur l'efficacité du système cartésien mais aussi sur l'encombrement global.
Actionneurs de robots cartésiens
Si un mécanisme cartésien est le meilleur choix, le facteur de conception suivant est généralement l'unité de commande de l'actionneur, qui peut être un système à boulons, à vis ou à entraînement pneumatique. Les actionneurs linéaires sont généralement disponibles avec un guide linéaire simple ou double, selon le système d'entraînement.
Contrôle et gestion des câbles
Le contrôle des câbles est une autre caractéristique essentielle de la conception de ce robot qui est souvent ignorée lors des premières étapes (ou simplement reportée à des étapes ultérieures du plan). Pour la commande, l'air (pour les axes pneumatiques), l'entrée du codeur (pour les cartésiens servocommandés), les capteurs et autres appareils électriques, chaque axe implique plusieurs câbles.
Lorsque les systèmes et les composants sont connectés par l'intermédiaire de l'Internet industriel des objets (IIoT), les méthodes et les outils utilisés pour les relier deviennent beaucoup plus critiques. Ces tubes, fils et connecteurs doivent être acheminés de manière appropriée et entretenus pour éviter une fatigue prématurée due à une flexion excessive ou une perturbation due à une interférence avec d'autres composants du dispositif.
Le type et la quantité de câbles requis, ainsi que la sophistication de la gestion des câbles, sont tous déterminés par le type de contrôle et de protocole réseau. Notez que le porte-câbles, les plateaux ou les boîtiers du système de gestion des câbles auront une incidence sur les mesures de l'ensemble du système. Assurez-vous donc qu'il n'y a pas de conflit entre le système de câblage et le reste des composants robotiques.
Commandes de robots cartésiens
Les robots cartésiens sont la méthode privilégiée pour effectuer des mouvements point à point, mais ils peuvent également effectuer des mouvements complexes interpolés et profilés. Le type de mouvement nécessaire déterminera le meilleur dispositif de commande, le protocole de réseau, l'IHM et les autres composants de mouvement pour le système.
Bien que ces composants soient situés indépendamment des axes du robot, ils auront, pour la plupart, un impact sur les moteurs, les câbles et les autres composants électriques nécessaires sur l'axe. Ces éléments sur l'axe influenceront les deux premières considérations de conception, le positionnement et le contrôle des câbles.
Par conséquent, le processus de conception est un cercle complet, soulignant l'importance de construire un robot cartésien comme un dispositif électromécanique interconnecté plutôt que comme un ensemble de pièces mécaniques attachées à un matériel et un logiciel électriques.
Enveloppe de travail d'un robot cartésien
Les différentes configurations de robots produisent des enveloppes de travail distinctes. Cette enveloppe de travail est cruciale lors du choix d'un robot pour une application spécifique car elle spécifie la zone de travail du manipulateur et de l'effecteur final. Pour une multitude d'applications, il convient de faire preuve de prudence lors de l'étude de l'enveloppe de travail d'un robot :
1. L'enveloppe de travail est la quantité de travail qui peut être approchée par un point à l'extrémité du bras robotique, qui est généralement le milieu des dispositions de montage des effecteurs terminaux. Elle ne comporte pas d'instruments ou de pièces appartenant à l'effecteur final.
2. Il y a parfois des endroits à l'intérieur de l'enveloppe opérationnelle où le bras robotique ne peut pas entrer. Les zones mortes sont le nom donné à des régions spécifiques.
La capacité de charge utile maximale citée n'est réalisable qu'avec telle longueur de bras, qui peut ou non atteindre la portée maximale.
3. L'enveloppe de travail de la configuration cartésienne est un prisme rectangulaire. À l'intérieur de l'enveloppe de travail, il n'y a pas de zones mortes et le Robot peut manipuler la totalité de la charge utile sur tout le volume de travail.