Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Tendances produits
{{{sourceTextContent.title}}}
Qu'est-ce qu'un robot cartésien ?
{{{sourceTextContent.subTitle}}}
Opposé à un autre type de robot ou de système multi-axes.
{{{sourceTextContent.description}}}
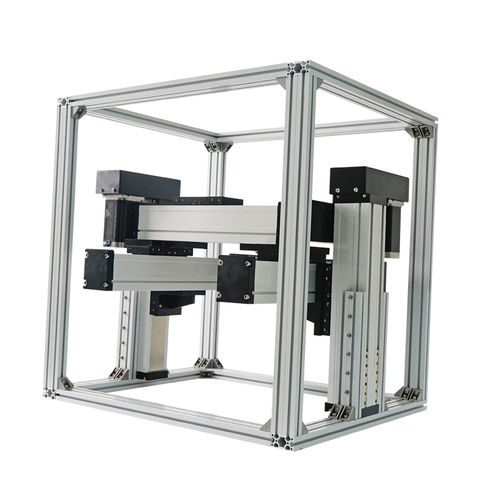
Premièrement, un système cartésien est un système qui se déplace sur trois axes orthogonaux - X, Y et Z - selon les coordonnées cartésiennes. (Il convient toutefois de noter qu'un axe rotatif - sous la forme d'un effecteur terminal ou d'un outil en bout de bras - est parfois inclus sur l'axe le plus externe d'un robot cartésien)
Ce qui fait d'un robot cartésien un robot, c'est que les axes effectuent un mouvement coordonné, par l'intermédiaire d'un contrôleur de mouvement commun.
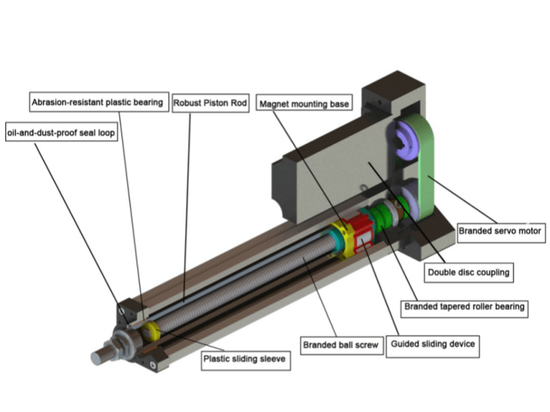
Les axes d'un robot cartésien sont constitués d'une certaine forme d'actionneur linéaire - soit acheté sous forme de système pré-assemblé auprès d'un fabricant, soit construit sur mesure par l'OEM ou l'utilisateur final à partir de composants de guidage et d'entraînement linéaires.
Simple, non ?
Mais tous les systèmes linéaires qui fonctionnent sur les axes X-Y ou X-Y-Z ne sont pas des robots cartésiens. Une exception notable est un type de robot qui utilise deux axes de base (X) en parallèle. Cette configuration - 2X-Y ou 2X-Y-Z, par exemple - fait sortir le robot de la catégorie cartésienne et le fait entrer dans la catégorie des robots portiques.
La principale différence entre les robots portiques et les robots cartésiens est qu'un robot cartésien utilise un actionneur linéaire sur chaque axe, alors qu'un robot portique est toujours construit avec deux axes de base (X), le second axe (Y) les reliant. Cette configuration empêche le deuxième axe d'être en porte-à-faux (voir ci-dessous) et permet aux portiques d'avoir des courses beaucoup plus longues - et dans de nombreux cas, des charges utiles plus importantes - que les robots cartésiens.
Le deuxième type de système linéaire multi-axes qui ne correspond pas à la définition du robot cartésien est la table XY. La différence entre les robots cartésiens et les tables XY réside dans la disposition du montage et du chargement. Dans un robot cartésien, le deuxième ou le troisième axe (Y ou Z) est en porte-à-faux et n'est soutenu qu'à une seule extrémité par l'axe situé en dessous. En outre, la charge sur l'axe extérieur est généralement en porte-à-faux par rapport à cet axe.
Cette disposition crée non seulement un moment de charge sur l'axe extérieur, dû à la charge appliquée, mais aussi un moment de charge important sur l'axe de support, dû à l'effet combiné de la charge appliquée et de l'axe extérieur. La disposition du montage et du chargement limite la capacité de charge des robots cartésiens et constitue un facteur essentiel pour déterminer la longueur de course maximale de l'axe extérieur (en porte-à-faux).
En revanche, les tables XY se composent de deux axes centrés l'un sur l'autre, souvent avec des longueurs de course similaires. En outre, la charge est généralement centrée sur l'axe Y. Cette configuration des axes et ce positionnement de la charge entraînent une très faible charge en porte-à-faux sur l'un ou l'autre des axes (et souvent aucune charge en porte-à-faux sur l'axe Y).
Les robots cartésiens chevauchent les robots SCARA et 6 axes (articulés) dans certaines spécifications techniques et peuvent être utilisés dans certaines des mêmes applications, mais les robots cartésiens présentent plusieurs avantages par rapport aux types SCARA et 6 axes. Tout d'abord, les conceptions cartésiennes offrent une enveloppe de travail rectangulaire dans laquelle un pourcentage important de l'empreinte du robot est utilisé comme zone de travail active. Les robots SCARA et à 6 axes, en revanche, ont des enveloppes de travail circulaires ou ovales qui se traduisent souvent par beaucoup d'espace mort (inutilisé), en particulier lorsque le déplacement requis, ou la portée, est très long.
Les robots cartésiens peuvent être construits à partir de pratiquement n'importe quel type d'actionneur linéaire avec n'importe quelle variété de mécanismes d'entraînement - courroie, vis à billes ou vis-mère, actionneur pneumatique ou moteur linéaire. (Notez que les entraînements à crémaillère sont également possibles, mais sont plus couramment utilisés dans les systèmes à portique avec de très longues courses) Cela signifie qu'ils peuvent avoir, et ont souvent, une meilleure précision de positionnement et une meilleure répétabilité que les types SCARA et 6 axes. Les robots cartésiens présentent également un avantage en termes de facilité d'utilisation et de programmation, car leur cinématique est plus simple (trois axes cartésiens plutôt que plusieurs axes de rotation).
Dans un passé récent, les robots cartésiens pré-assemblés étaient rares, la plupart des unités étant construites sur mesure par un OEM, un intégrateur de robots ou même l'utilisateur final. Mais aujourd'hui, de nombreux fabricants d'actionneurs linéaires fournissent également des systèmes cartésiens préconfigurés et préassemblés, avec une myriade d'options pour répondre aux exigences courantes en matière de déplacement, de charge utile, de vitesse et de précision. Les fabricants de robots traditionnels à 6 axes et SCARA se lancent également dans l'aventure, reconnaissant que pour de nombreuses applications d'automatisation et d'assemblage industriels, les robots cartésiens offrent un meilleur compromis entre la capacité de charge et l'encombrement que les modèles SCARA et à 6 axes.