Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Actualités du secteur
{{{sourceTextContent.title}}}
Qu'est-ce que l'erreur de subdivision (SDE) dans les codeurs linéaires ?
{{{sourceTextContent.subTitle}}}
Précision de l'interpolation.
{{{sourceTextContent.description}}}
Pour déterminer la position d'un axe linéaire, une tête de lecture de codeur se déplace le long d'une échelle et "lit" les changements de lumière (pour les codeurs optiques) ou de champ magnétique (pour les types magnétiques). Lorsque la tête de lecture enregistre ces changements, elle produit des signaux sinus et cosinus qui sont décalés de 90 degrés l'un par rapport à l'autre (appelés "signaux en quadrature"). Ces signaux sinus et cosinus analogiques sont convertis en signaux numériques, qui sont ensuite interpolés - dans certains cas, par un facteur de 16 000 ou plus - pour augmenter la résolution. Mais l'interpolation ne peut être précise que si les signaux analogiques d'origine sont exempts d'erreurs. Toute imperfection dans les signaux sinus et cosinus - appelée erreur de subdivision - dégrade la qualité de l'interpolation et réduit la précision du codeur.
L'erreur de subdivision est cyclique, se produisant à chaque intervalle de la gamme ou du pas de balayage (c'est-à-dire à chaque période de signal), mais elle ne s'accumule pas et est indépendante de la gamme ou de la longueur de parcours. Les deux causes principales de la SDE sont les imprécisions mécaniques et le désalignement entre la règle et la tête de lecture, bien que les perturbations harmoniques puissent également provoquer des distorsions dans les signaux sinus et cosinus.
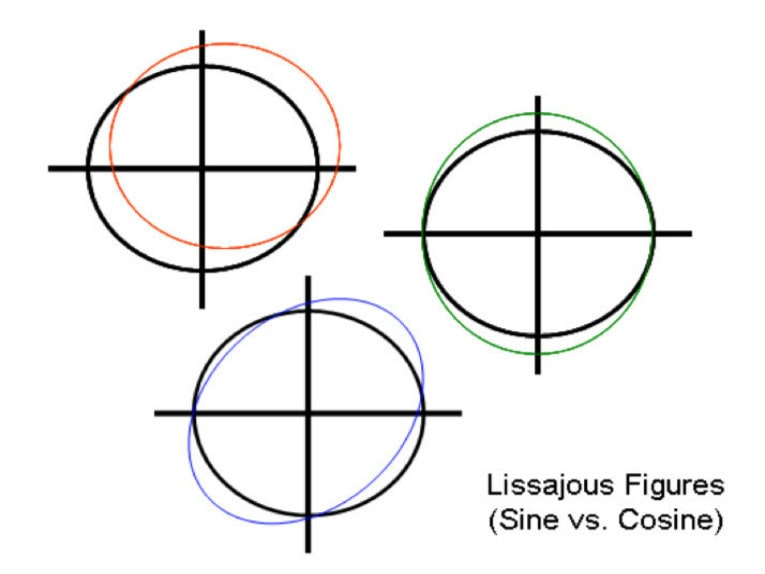
Utilisation d'un modèle de Lissajous pour déterminer l'erreur de subdivision
Pour analyser l'erreur de subdivision, l'amplitude du signal de l'onde sinusoïdale est tracée sur un graphique X-Y en fonction de l'amplitude du signal de l'onde cosinusoïdale, dans le temps. Cela crée ce que l'on appelle un modèle "Lissajous".
Avec le tracé centré sur la coordonnée 0,0, si les signaux sont déphasés d'exactement 90 degrés et ont une amplitude de 1:1, le tracé formera un cercle parfait. L'erreur de subdivision peut se manifester par un décalage du point central, ou par des différences de phase (le décalage du sinus et du cosinus n'est pas exactement de 90 degrés) ou d'amplitude entre les signaux sinus et cosinus. Même dans les codeurs de haute qualité, la SDE peut représenter 1 à 2 % de la période du signal, de sorte que l'électronique de traitement du signal inclut souvent des corrections de gain, de phase et de décalage pour contrer les erreurs de subdivision.
Les lecteurs directs nécessitent des codeurs de haute précision
La précision du codeur est importante pour les applications de positionnement commandées par des moteurs rotatifs couplés mécaniquement, mais la précision est particulièrement critique lorsqu'un moteur linéaire à entraînement direct est utilisé. La différence réside dans la manière dont la vitesse est contrôlée.
Dans une application traditionnelle de moteur rotatif, un codeur rotatif fixé au moteur fournit des informations sur la vitesse, tandis que le codeur linéaire fournit des informations sur la position. Mais dans les applications à entraînement direct, il n'y a pas de codeur rotatif. Le codeur linéaire fournit un retour d'information à la fois pour la vitesse et la position, l'information de vitesse étant dérivée de la position du codeur. L'erreur de subdivision, qui empêche le codeur d'indiquer la position avec précision et donc de dériver l'information sur la vitesse, peut entraîner une ondulation de la vitesse.
En outre, les systèmes à entraînement direct peuvent être exploités avec des gains élevés de la boucle de contrôle, ce qui leur permet de réagir rapidement pour corriger les erreurs de position ou de vitesse. Mais à mesure que la fréquence de l'erreur augmente, le contrôleur est incapable de suivre l'erreur, et le moteur tire plus de courant en essayant de répondre, ce qui entraîne un bruit audible et un échauffement excessif du moteur.