Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Tendances produits
{{{sourceTextContent.title}}}
Systèmes linéaires pour le nanopositionnement
{{{sourceTextContent.subTitle}}}
Actionneurs piézoélectriques, Actionneurs à bobine mobile, Etages à moteur linéaire.
{{{sourceTextContent.description}}}
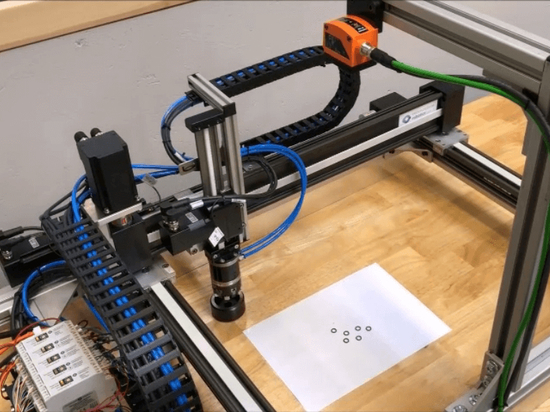
Lorsqu'on parle de mouvement linéaire, on parle généralement d'applications où la distance de déplacement est d'au moins quelques centaines de millimètres, et le positionnement requis est de l'ordre de quelques dixièmes de millimètres. Et pour ces exigences, les guides et les entraînements avec des paliers à recirculation de billes conviennent parfaitement. Exemple : l'écart de pas d'une vis à billes de classe 5 est de 26 microns pour 300 mm de course. Mais lorsque l'application exige un positionnement de l'ordre du nanomètre - un milliardième de mètre - les ingénieurs doivent regarder au-delà des éléments mécaniques de roulement et de recirculation afin d'obtenir la résolution requise.
Les trois solutions de mouvement linéaire les plus courantes pour le nanopositionnement sont les actionneurs piézoélectriques, les actionneurs à bobine mobile et les étages à moteur linéaire. Le mécanisme d'entraînement de chacune de ces solutions est totalement dépourvu d'éléments mécaniques roulants ou coulissants, et elles peuvent être associées à des paliers à air pour une précision et une résolution de positionnement élevées.
Actionneurs piézoélectriques
Les actionneurs piézoélectriques (également appelés moteurs piézoélectriques) profitent de l'effet piézoélectrique inverse pour produire un mouvement et une force. Il existe de nombreux styles d'actionneurs piézoélectriques, mais deux d'entre eux sont couramment utilisés pour le nanopositionnement : le pas linéaire et l'ultrason linéaire. Les moteurs piézoélectriques linéaires pas à pas utilisent plusieurs éléments piézoélectriques montés en ligne qui agissent comme des paires de "jambes" Lorsqu'une charge électrique est appliquée, une paire de jambes saisit une tige longitudinale par friction et la fait avancer lorsque les jambes s'étendent et se plient. Lorsque cette paire de jambes se relâche, la paire suivante prend le relais. En fonctionnant à des fréquences extrêmement élevées, les moteurs piézoélectriques linéaires pas à pas produisent un mouvement linéaire continu avec des courses allant jusqu'à 150 mm et une résolution au niveau du picomètre.
Les moteurs piézoélectriques linéaires à ultrasons sont basés sur une plaque piézoélectrique. Lorsqu'une charge électrique est appliquée à la plaque, celle-ci est excitée à sa fréquence de résonance, ce qui la fait osciller. Ces oscillations produisent des ondes ultrasonores dans la plaque. Un coupleur (ou poussoir) est fixé à la plaque et préchargé contre une tige longitudinale (également appelée coulisse). Les ondes ultrasonores provoquent l'expansion et la contraction de la plaque de manière elliptique, ce qui permet au couplage de faire avancer la tige et de produire un mouvement linéaire. Les moteurs piézoélectriques linéaires à ultrasons peuvent atteindre une résolution de 50 à 80 nm, avec une course maximale similaire à celle des moteurs linéaires pas à pas, de 100 à 150 mm.
Actionneurs à bobine mobile
Une autre solution pour les applications de nanopositionnement sont les actionneurs à bobine mobile. Tout comme les moteurs linéaires, les actionneurs à bobine mobile utilisent un champ d'aimant permanent et un enroulement de bobine. Lorsqu'un courant est appliqué à la bobine, une force est générée (connue sous le nom de force de Lorentz). L'ampleur de cette force est déterminée par le produit du courant et du flux magnétique.
Cette force provoque le déplacement de la partie mobile (qui peut être soit l'aimant, soit la bobine), le guidage étant assuré par des paliers à air ou des glissières à rouleaux croisés. Les actionneurs à bobine mobile peuvent atteindre une résolution allant jusqu'à 10 nm, avec des courses allant généralement jusqu'à 30 mm, bien que certains soient disponibles avec des courses allant jusqu'à 100 mm.
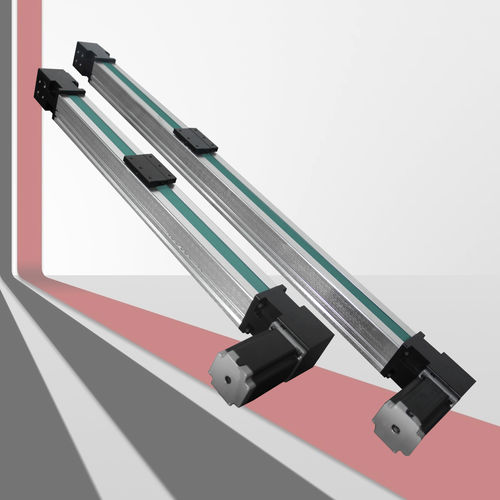
Étages à moteur linéaire
Lorsqu'une résolution de l'ordre du nanomètre est nécessaire sur des courses plus longues, les étages à moteur linéaire avec paliers à air sont généralement le meilleur choix. Alors que les actionneurs piézoélectriques et à bobine mobile ont des capacités de déplacement limitées, les moteurs linéaires peuvent être conçus pour des déplacements allant jusqu'à plusieurs mètres. L'utilisation de paliers à air comme système de guidage rend une platine à moteur linéaire totalement sans contact, sans éléments de transmission mécanique ni frottement pour affecter le mouvement et la précision du positionnement. En fait, les étages à moteur linéaire avec paliers à air peuvent atteindre une résolution de l'ordre du nanomètre.
L'inconvénient des étages à moteur linéaire pour les applications de nanopositionnement est leur empreinte, qui est beaucoup plus grande que celle des actionneurs piézoélectriques ou à bobine mobile. Bien qu'ils puissent être difficiles à intégrer dans de petits dispositifs, ils conviennent bien aux applications qui nécessitent une course relativement longue et une haute résolution, comme l'imagerie médicale.