Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Tendances produits
{{{sourceTextContent.title}}}
Mouvement linéaire pour la manutention robotisée dans les entrepôts automatisés
{{{sourceTextContent.subTitle}}}
Système de prélèvement et de mise en place pour tubes à essai
{{{sourceTextContent.description}}}
Lors de la conception et de la configuration d'un entrepôt automatisé, l'un des objectifs de la conception est de garder le système aussi léger et compact que possible. Selon la taille de la charge déplacée, il existe deux types courants d'entrepôts automatisés. Dans les applications plus légères, les structures en aluminium peuvent supporter des charges allant jusqu'à 100 kilogrammes, tandis que les structures en acier conviennent aux charges plus lourdes de plus de 100 kilogrammes.
La plupart des entrepôts traditionnels utilisent des chariots élévateurs à fourche de hauteur limitée, tandis que les entrepôts automatisés utilisent l'espace vertical. Choisir les bons composants est essentiel pour s'assurer qu'un système d'entreposage automatisé optimise la gestion logistique. Et les actionneurs linéaires sont un bon point de départ.
Souvent utilisés pour le bras de préhension dans les navettes de stockage automatisées, les chemins de roulement en acier trempé par induction des rails télescopiques offrent des propriétés de roulement optimales. Ils présentent peu de déflexion lorsqu'ils sont soumis à de fortes charges, même lorsqu'ils sont complètement déployés.
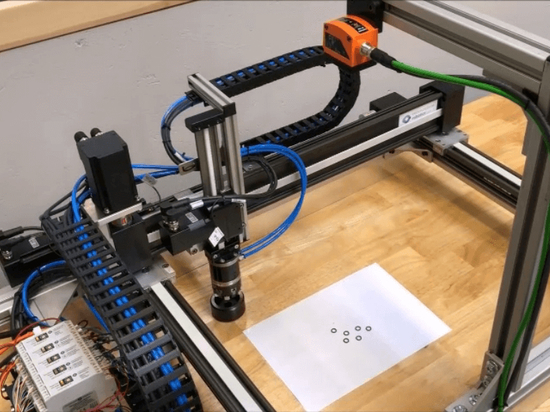
Une application de manutention critique récente dans l'industrie médicale a utilisé des actionneurs linéaires pour donner un nouveau look à cet entrepôt automatisé.
Ce système de prélèvement et de mise en place permet de déplacer les récipients de tubes à essai pour les analyses sanguines dans un entrepôt réfrigéré. Le robot se déplace le long d'un réseau d'axes pour atteindre des étagères positionnées le long des couloirs automatisés de l'entrepôt, adoptant une trajectoire perpendiculaire et changeant de direction à 90 degrés. La situation est encore compliquée par la possibilité de surfaces irrégulières où les rails glissent.
Lorsque le robot passe d'une voie à une voie perpendiculaire, ce type de manipulation est géré par des roulements à recirculation de billes communs qui nécessitent des alignements précis. En même temps, la configuration d'un système coulissant avec des roues ou un jeu de roulements sur les rails ne garantit pas la stabilité et la précision nécessaires à la pose des objets.
Il s'agissait de trouver la bonne solution pour ces opérations de manutention et une configuration fiable pour l'ensemble du système.
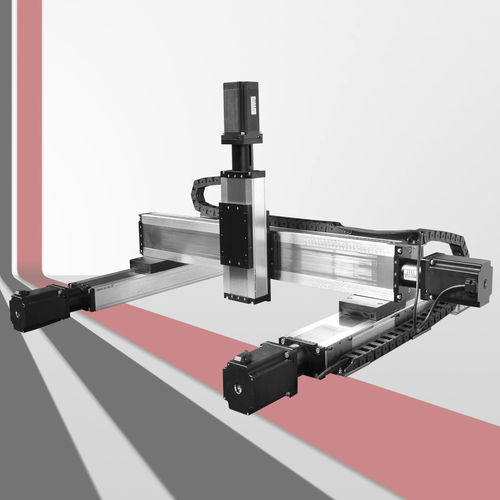
Comme le client avait besoin de mouvements fluides et précis le long de l'axe X, Rollon a recommandé son rail compact pour gérer les mouvements robotiques du système et l'aider à atteindre et à saisir les éprouvettes placées sur les étagères des entrepôts. Disponibles avec différents profils et un coulisseau qui s'adapte dans un profil de rail, ces rails linéaires sont livrés avec des chemins de roulement trempés qui absorbent tout désalignement de surface.
Rollon a géré le passage de l'axe X à l'axe Y en montant une autre paire de glissières sur le chariot pour soutenir et déplacer le robot, ainsi que deux sections de rails placées perpendiculairement au premier ensemble. Lorsque le chariot atteint la position latérale, il se décroche de l'axe principal et deux curseurs supplémentaires entrent dans les rails perpendiculaires et guident le robot le long de l'axe Y. La taille pratique du roulement de rail compact aide à gérer le passage des curseurs des sections de rail sur le chariot, aux voies perpendiculaires de rail avec une relative facilité. Fabriqué en acier trempé, ce système se compose de chemins de roulement trempés et de glissières à billes radiales de haute précision.