Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Tendances produits
{{{sourceTextContent.title}}}
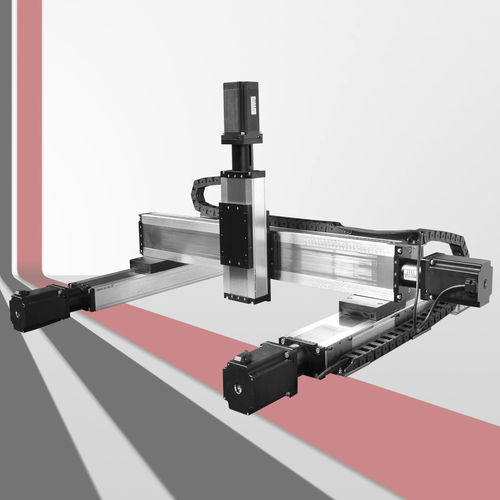
Étapes/tables de positionnement linéaire
{{{sourceTextContent.subTitle}}}
Robot cartésien pour système de portique
{{{sourceTextContent.description}}}
Les plateaux et tables de positionnement sont utilisés dans les systèmes de contrôle de mouvement pour maintenir une pièce de travail et/ou la positionner pour une opération donnée. Les scènes ou les tables, qu'elles soient linéaires ou rotatives, sont le plus souvent des sous-systèmes de mouvement complets. Autrement dit, ce sont des systèmes de mouvement eux-mêmes composés d'un système de composants de contrôle de mouvement tels que des composants de mouvement linéaire, des moteurs ou des actionneurs, des encodeurs, des capteurs et des contrôleurs. Par exemple, les étages de positionnement sont généralement des ensembles de mouvement linéaire composés de guides ou de chariots linéaires et d'un certain type de mécanisme d'entraînement.
Les platines et les tables sont utilisées dans une série d'applications à hautes performances telles que les robots industriels, la fibre optique et la photonique, les systèmes de vision, les machines-outils, l'assemblage, les équipements à semi-conducteurs, l'usinage laser de composants médicaux, le micro-usinage, la fabrication électronique et d'autres applications d'automatisation industrielle.
Les étapes peuvent fournir un des différents types de mouvement. Ils peuvent être linéaires, rotatifs ou même de type élévateur (étages de positionnement sur l'axe Z). Parmi celles-ci, elles peuvent être configurées de nombreuses façons différentes, notamment pour un mouvement dans une seule direction (ou axe), dans plusieurs directions (positionnement X-Y), ou pour des mouvements extrêmement petits et précis, comme dans les applications de nanopositionnement où les mouvements sont de l'ordre du micro ou du nanomètre.
Les mécanismes d'entraînement pour les étages et les tables de positionnement peuvent également varier considérablement, en fonction d'un certain nombre de facteurs, notamment le coût et la précision souhaitée. Par exemple, les étages peuvent être à entraînement direct par des servomoteurs linéaires ou par une combinaison de moteurs et d'engrenages et d'accouplements, à entraînement linéaire ou rotatif (soit par des actionneurs électriques, soit même par des actionneurs pneumatiques ou hydrauliques). D'autres méthodes peuvent inclure des systèmes de courroies et de poulies, des vis à billes ou des vis sans fin.
Les exigences de précision et d'exactitude peuvent également dicter les décisions de conception, comme les composants utilisés dans l'assemblage d'une étape de positionnement. Les paliers à air sont un type de composant utilisé dans les étapes où la fiabilité et une grande précision sont souhaitées. Les roulements à air supportent une charge grâce à un mince film d'air pressurisé entre les éléments fixes et mobiles. Ils sont généralement appelés "paliers aérostatiques", car une source de pression plutôt qu'un mouvement relatif fournit le film d'air.
Contrairement aux roulements ordinaires, les surfaces d'un palier à air n'ont pas de contact mécanique, de sorte que ces systèmes n'ont pas besoin d'être lubrifiés. Comme les surfaces ne s'usent pas, les systèmes ne génèrent pas de particules, ce qui les rend adaptés aux applications en salle blanche. Lorsqu'ils sont alimentés en air propre et filtré, les roulements peuvent fonctionner sans défaillance pendant de nombreuses années.
Parmi les paramètres importants pour le choix du stade de positionnement approprié, on peut citer la résolution nécessaire de l'application (ou le plus petit incrément à déplacer ou à mesurer), la répétabilité et la précision requises, et d'autres paramètres mécaniques tels que le jeu et l'hystérésis.